
Vplyv prostredia virtuálnej reality počas roboticky asistovaného lokomočného tréningu na motorické funkcie pacientov s detskou mozgovou obrnou
The Effect of Virtual Reality Environment during Robotic‑Assisted Locomotor Training on Gross Motor Functions in Patients with Cerebral Palsy
Objective:
The aim of study was to examine the effect of virtual reality during Robotic‑Assisted Treadmill Training (RATT) on gross motor functions in children with Cerebral Palsy (CP).
Material and methods:
Fourty-two children (25 boys) with bilateral spastic CP, aged 4.3– 12.9 years underwent 20 sessions of RATT during 4– 6‑week period with frequency of 3- to 5- times a week using driven gait orthosis Lokomat. Patients were randomly allocated into two groups according to whether they trained in a virtual reality environment (VR‑LOKO, n = 26) or not (LOKO, n = 16). Outcome measures were dimensions A (lying, rolling), B (sitting), C (crawling, kneeling), D (standing), E (walking, running, jumping) of the Gross Motor Function Measure (GMFM).
Results:
After completing 20 sessions, patients in both groups demonstrated highly statistically significant improvement (p < 0.001) in all dimensions of the GMFM. Comparing the mean improvement in outcome parameters in both groups (LOKO vs VR‑LOKO), we documented a statistically significant difference (p < 0.05) in the A and C dimensions, and overall improvement in the GMFM in favour of patients in VR‑LOKO group.
Conclusions:
The results of our study indicate that the use of virtual reality during RATT has an effect on the achieved improvement in some motor functions in CP patients. VR‑based training conditions represent a valuable approach to enhancing active participation during RATT in children with CP.
Key words:
treadmill – cerebral palsy – motor function
The authors declare they have no potential conflicts of interest concerning drugs, products, or services used in the study.
The Editorial Board declares that the manuscript met the ICMJE “uniform requirements” for biomedical papers.
Autoři:
S. Klobucká 1; E. Žiaková 1,2; R. Klobucký 3
Působiště autorů:
Rehabilitačné centrum Harmony, Bratislava
1; Slovenská zdravotnícka univerzitav Bratislave, FO a ZOŠ
2; Sociologický ústav, Slovenská akadémia vied, Bratislava
3
Vyšlo v časopise:
Cesk Slov Neurol N 2013; 76/109(6): 702-711
Kategorie:
Původní práce
Souhrn
Cieľ:
Cieľom štúdie bolo posúdenie vplyvu prostredia virtuálnej reality počas roboticky asistovaného lokomočného tréningu na funkcie hrubej motoriky u pacientov s DMO.
Súbor a metodika:
Štyridsať dva detí (25 chlapcov) s bilaterálne spastickou formou detskej mozgovej obrny vo veku medzi 4,3 a12,9 rokov absolvovalo 20 terapeutických jednotiek (TJ) Robotic‑Assisted Treadmill Training (RATT) počas štyroch až šiestich týždňov v systéme Lokomat s frekvenciou tri- až päťkrát týždenne. Pacienti boli rozdelení do dvoch skupín podľa toho, či trénovali v prostredí virtuálnej reality (VR‑LOKO, n = 26) alebo bez (LOKO, n = 16). Hodnotené parametre: dimenzia A (ľah, otáčanie), B (sed), C (plazenie, lezenie), D (stoj), E (chôdza, beh, poskoky) testu Gross Motor Function Measure (GMFM).
Výsledky:
Po absolvovaní 20 TJ sme zaznamenali u pacientov oboch skupín štatisticky vysoko signifikantné zlepšenie (p < 0,001) vo všetkých dimenziách testu GMFM. Porovnaním priemerných zlepšení výsledných parametrov (v %) v oboch skupinách (LOKO vs VR‑LOKO) sme dokumentovali štatisticky signifikantný rozdiel (p < 0,05) v dimenzii A, C a v celkovom zlepšení GMFM testu v prospech skupiny VR‑LOKO.
Záver:
Výsledky tejto štúdie naznačujú, že prostredie virtuálnej reality implementované počas RATT, má vplyv na dosiahnuté zlepšenie niektorých motorických funkcií u detí s DMO. Tréning vo virtuálnom prostredí predstavuje významnú možnosť zvýšenia aktívnej participácie počas RATT u detí s DMO.
Kľúčové slová:
treadmill – detská mozgová obrna – motorické funkcie
Použité skratky
VR virtuálna realita
RATT Robotic‑Assisted Treadmill Training
GMFM Gross Motor Function Measure
GMFCS Gross Motor Function Classification Scale
CPG Central Pattern Generator
DGO Driven Gait Orthosis
SCI Spinal Cord Injuries
TBI Traumatic Brain Injuries
Úvod
Komplexná problematika detí s DMO si vyžaduje multidisciplinárny prístup zahŕňajúci spoluprácu neurológa, rehabilitačného lekára, fyzioterapeuta, ortopéda, ortopedického protetika, psychológa, logopéda, foniatra, oftalmológa a i., s náväznosťou na sociálnu výpomoc a špeciálnu pedagogiku. Veľmi dôležité je včasné začatie rehabilitácie, pričom jej základným prvkom je liečebná telesná výchova. Cieľom liečby nie je vyliečenie alebo dosiahnutie normálneho stavu. Reálnym cieľom liečby je zväčšiť funkčnosť, zlepšiť schopnosti a udržiavať zdravie v zmysle lokomócie, kognitívneho vývoja, sociálnej integrácie a nezávislosti [1]. V súčasnosti sa kladie čoraz väčší dôraz na aktívny prístup v terapii, vrátane intenzívneho, repetitívneho cieleného tréningu stimulujúceho neuroplasticitu. V uplynulom desaťročí došlo k markantnému vzostupu využitia robotickej terapie predovšetkým u pacientov po cievnych mozgových príhodách, cerebrospinálnych traumách a v neposlednom rade tiež u detí s detskou mozgovou obrnou.
Vychádzajúc z princípu motorického učenia, ktorý popisuje koreláciu medzi opakovaním činností a zlepšením motorickej funkcie, bola koncom 90. rokov (University Zurich, 1998) vyvinutá roboticky asistovaná lokomočná terapia pomocou počítačovo riadených elektronických ortéz.
Aktivácia spinálnych a supraspinálnych CPG (Central Pattern Generators), ako sa popisuje v experimentoch na zvieratách, podporuje teoretický základ tohto terapeutického konceptu [2– 5]. CPG sú aktivované nižšími mozgovými centrami (mozgový kmeň, bazálne gangliá), ktoré následne aktivujú svaly vykonávajúce cyklické a opakované chôdzové pohyby. Keďže vyššie mozgové centrá sú u detí s DMO často poškodené, predpokladá sa, že aktivácia CPG a automatické recipročné mechanizmy majú dôležitú úlohu v stimulácii chôdze pomocou lokomočného tréningu [5]. Existenciu CPG u človeka by mohol podporiť aj fakt, že reflex chôdzového mechanizmu je zachovaný aj u anencefalických novorodencov [6,7], avšak jednoznačný dôkaz stále chýba. Pre stimuláciu lokomočných centier v mieche je zásadné optimálne množstvo aferentných vzruchov. To môžeme dosiahnuť opakovaním pohybov dolných končatín v rytmickom fyziologickom vzorci [8].
Roboticky asistovaný lokomočný tréning nadväzuje na manuálne asistovaný tréning chôdze pomocou pohyblivého chodníka. V porovnaní s ním môžeme dosiahnuť predovšetkým konštantný a reprodukovateľný aferentný vstup, presnú kontrolu a možnosť regulácie hlavných parametrov chôdzového stereotypu a výrazné uľahčenie práce s pacientom s poruchou alebo neschopnosťou chôdze. Tréning môže byť vďaka tomu dlhší, liečba efektívnejšia a dá sa očakávať rýchlejšie dosiahnutie pozitívnych výsledkov.
Viacerí autori preukázali účinnosť roboticky asistovanej lokomočnej terapie na zlepšenie chôdze u dospelých po cievnych mozgových príhodách a po úrazoch mozgu a miechy [9– 14]. Predbežné štúdie poukazujú na sľubný efekt RATT (Robotic‑Assisted Treadmill Training) aj u pacientov s inými neurologickými ochoreniami, napr. s roztrúsenou sklerózou alebo Parkinsonovou chorobou [15,16].
RATT sa od r. 2005 začal využívať taktiež u detských pacientov s poruchami motorických funkcií rôznej etiológie, najčastejšie u detí s DMO. V non‑randomizovaných štúdiách s RATT u detí s centrálne podmienenou poruchou chôdze použitím Lokomatu® sa preukázalo zlepšenie motorických funkcií, rýchlosti a vytrvalosti pri chôdzi, ako aj stereotypu chôdze [2,6,17,18]. Motivácia pacienta zohráva kľúčovú úlohu vo výsledkoch terapeutického úsilia, v určitej populácii pacientov je dokonca najkritickejším faktorom úspechu rehabilitačného tréningu [19]. Deti, hlavne mladšie, nedokážu udržať pozornosť pri tréningu dlhšiu dobu. Preto bolo nevyhnutné implementovať ďalšie kontrolné stratégie a adaptovaný biofeedback pre deti [20]. Holden [21] potvrdil, že rehabilitácia hornej a dolnej končatiny vo virtuálnom prostredí môže byť kvalitnejšia než tréning v reálnych situáciách. Predbežné výsledky tréningu pacientov s DMO pomocou RATT v prostredí virtuálnej reality sú sľubné [20]. Brütsch et al [19,22] v prípadových štúdiách potvrdili, že participácia pacienta počas tréningu chôdze v systéme Lokomat môže byť pozitívne ovplyvnená vizuálnou stimuláciou virtuálneho prostredia. Doposiaľ nebolo preukázané, či RATT v prostredí VR môže viesť k zlepšeniu motorických funkcií v rehabilitačnom procese pacientov s DMO.
V recentných štúdiách je pri tréningu chôdze hodnotená v rámci škály GMFM [23,24] len dimenzia D (stoj) a E (chôdza, beh, skoky). Avšak po absolvovaní série terapeutických jednotiek RATT sme u našich pacientov pozorovali okrem iného tiež stabilizáciu trupového svalstva, čo sa prejavilo v zlepšení sedu, lezenia a otáčania. Preto sme sa v tejto práci rozhodli testovať u každého pacienta všetky dimenzie škály GMFM‑88 (A, B, C, D, E). Taktiež sme si všimli, že deti, ktoré trénovali v prostredí VR, boli motivovanejšie a dosahovali lepšie výsledky v testoch GMFM.
Cieľom prezentovanej randomizovanej klinickej štúdie bolo zhodnotiť vplyv RATT na motorické funkcie pacientov s DMO. Zároveň sme sa pokúsili dokumentovať možnosť ovplyvnenia motorických funkcií u detí s DMO implementáciou prostredia VR počas roboticky asistovaného lokomočného tréningu.
Metódy
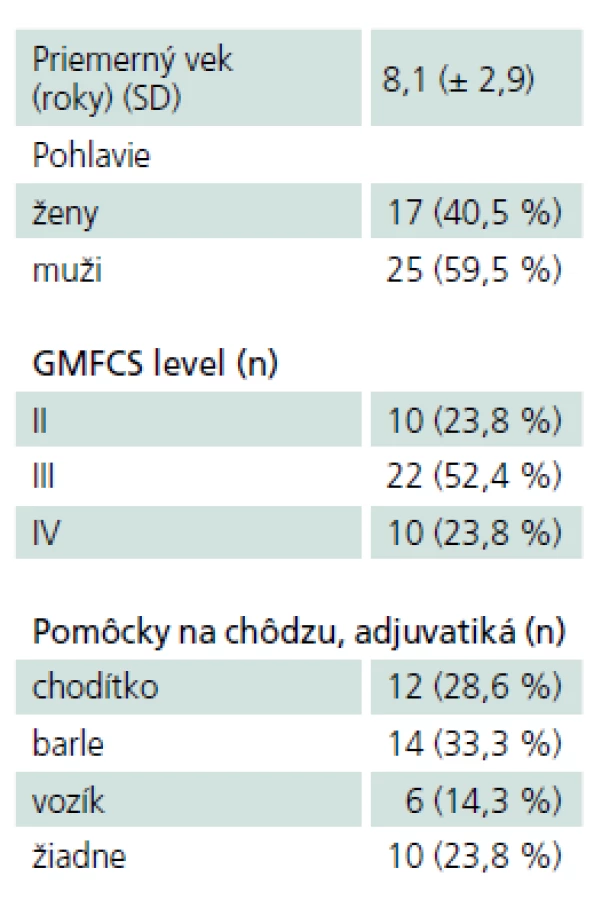
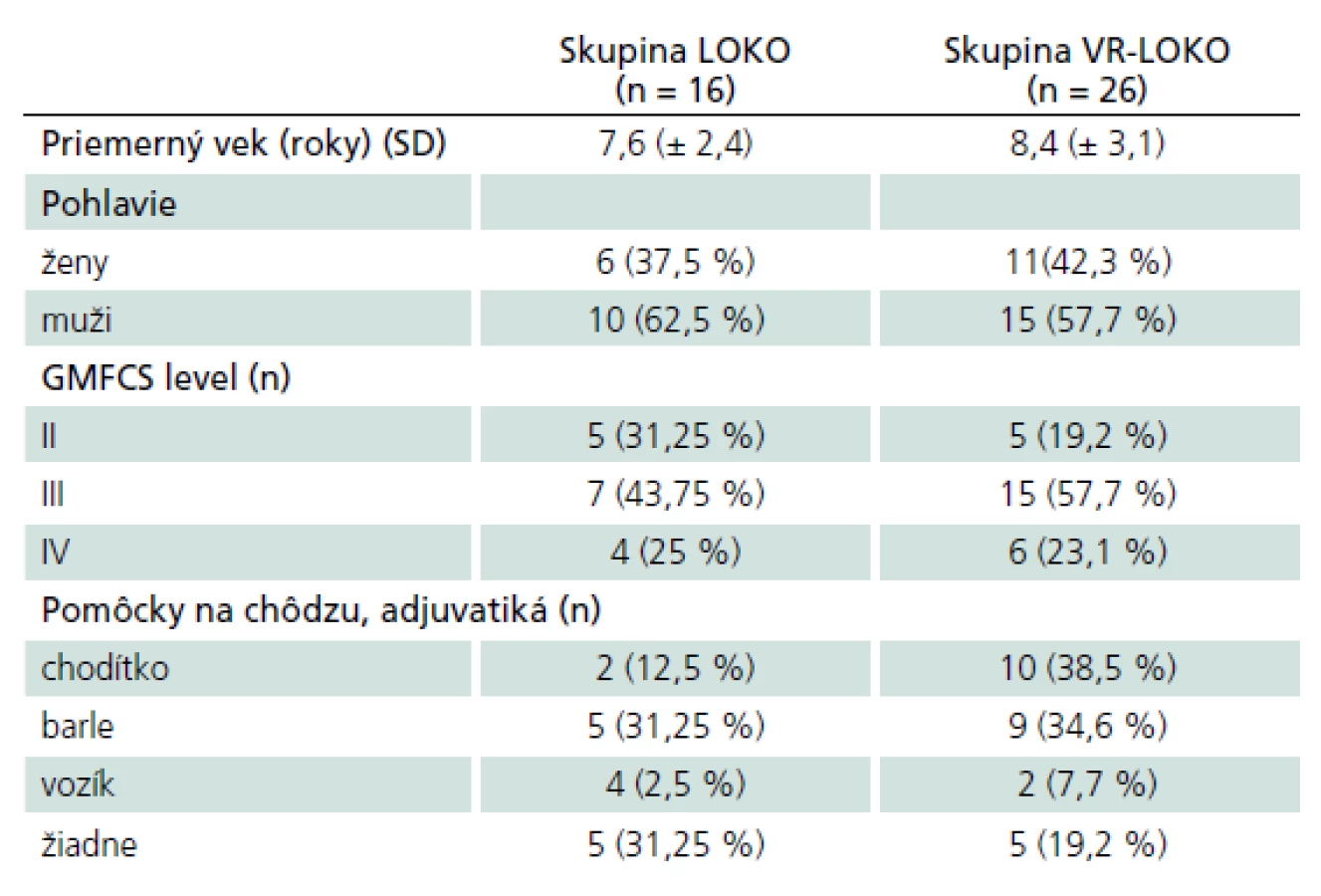
Výskum sa uskutočnil v období od marca 2008 do septembra 2011 v Rehabilitačnom centre Harmony, Bratislava. Štyridsať dva pacientov (25 chlapcov a 17 dievčat) s bilaterálne spastickou DMO vo veku medzi 4,3 a12,9 rokov (priemerný vek 8,1 rokov, SD ± 2,9) absolvovalo ambulantne 20 terapeutických jednotiek RATT pomocou elektronicky riadených ortéz v systéme Lokomat® (tab. 1). Pacienti boli rozdelení do dvoch skupín podľa toho, či trénovali v prostredí VR alebo nie. Šestnácť pacientov absolvovalo roboticky asistovaný lokomočný tréning bez aplikácie VR (skupina LOKO). Dvadsať šest pacientov absolvovalo terapiu v prostredí VR (skupina VR‑LOKO) (tab. 2). Závažnosť postihnutia bola determinovaná prostredníctvom GMFCS škály (Gross Motor Function Classification Scale) [25]. Pacienti s GMFCS úrovňou II (n = 10) boli hodnotení ako mierne postihnutí. Pacienti s GMFCS úrovňou III, IV boli hodnotení ako závažnejšie postihnutí (n = 32) (tab. 1).
Do štúdie boli zaradení pacienti s bilaterálne spastickou DMO [26]. Jej najčastejšou formou je diparetická, pri ktorej je postihnutie dolných končatín výraznejšie. U všetkých je tiež konštantné postihnutie horných končatín, ale väčšinou len mierne. Kvadruparetická forma s bilaterálnou hemiparézou má výraznejšie postihnutie horných končatín alebo rovnomerné postihnutie všetkých štyroch končatín [26]. Diagnózu stanovil detský neurológ podľa MKCH‑10. Dĺžka femuru bola minimálne 21 cm, čo koreluje s vekom približne štyri roky. Pacienti museli byť schopní spoľahlivo signalizovať bolesť, strach alebo prípadný diskomfort počas liečby. Nevyhnutným predpokladom bol normálny alebo normálny korigovaný zrak.
Vylučujúce kritériá
Do štúdie neboli zaradené deti s fixovanými kontraktúrami DK, pacienti po aplikácii botulotoxínu (BTX) do spastických svalov alebo pacienti, ktorí absolvovali chirurgickú (ortopedickú) intervenciu počas troch mesiacov pred začatím liečby v Lokomate®. Kontraindikáciou boli taktiež závažné ochorenia kardiovaskulárneho systému, akútne alebo progresívne neurologické ochorenia, nespolupracujúci, agresívni pacienti, ťažký kognitívny deficit, nemožnosť prispôsobenia ortézy pacientovi, ťažké väzivové skrátenie svalu v oblasti DK, nekonsolidované fraktúry, ťažká osteoporóza, artrodéza bedrového, kolenného, členkového kĺbu, osteomyelitída, výrazná asymetria končatín, extrémna disproporcia rastu dolných končatín alebo chrbtice.
Pacienti alebo ich právni zástupcovia boli informovaní o priebehu a okolnostiach roboticky asistovanej lokomočnej terapie, ako aj o použití výsledkov testov pre účely výskumu. U každého pacienta bol vyžiadaný písomný informovaný súhlas (od rodičov, prípadne zákonných zástupcov).
Popis zariadenia
Lokomat® je medicínsko-technické zariadenie, ktoré nadväzuje na manuálne asistovaný tréning chôdze pomocou pohyblivého chodníka. Vznikol vďaka spolupráci vedcov, lekárov, fyzioterapeutov a pacientov v Spinálnom centre Univerzitnej nemocnice Balgrist v Zürichu. Projekt realizovala taktiež švajčiarska firma HOCOMA. Pozostáva z niekoľkých základných komponentov, a to pohyblivého chodníka (treadmill), špeciálneho patentovaného závesného systému a elektronicky riadených ortéz (Driven Gait Orthosis, DGO). Elektromechanický odľahčovací systém monitoruje a prispôsobuje odľahčenie v reálnom čase na požadovanej úrovni. Pohyblivé časti sú ovládané tromi počítačmi a špeciálnym softvérom. Počítačovo riadené ovládače na každom bedrovom a kolennom kĺbe sú synchronizované s rýchlosťou pohyblivého pásu. Snímače sily na týchto kĺboch sú prepojené tak, aby zaznamenávali interakciu medzi pacientom a systémom Lokomat®. Keďže sú parametre každého tréningu (vzdialenosť, rýchlosť, počet krokov, miera odľahčenia hmotnosti aj guidance force – vodiaca sila) dobre definované a kontinuálne monitorované, tréning chôdze môže byť ľahko porovnateľný interindividuálne, ako aj medzi jednotlivými terapeutickými jednotkami. Táto skutočnosť ponúka nové možnosti nielen pre výskum, ale aj pre špecifický terapeutický plán a vedenie pacienta (obr. 1).

Dôležitým prvkom v terapii je dynamická fixácia panvy pomocou ortéz a polohovateľnej panvovej opierky, čo umožňuje dosiahnuť priblíženie sa k jej fyziologickému postaveniu pri ideálnom stereotype chôdze. Dorzálnu flexiu členkového kĺbu dosahujeme pomocou pasívneho upnutia chodidla (foot lifter). Na monitoroch smerovaných k pacientovi aj terapeutovi môžeme v reálnom čase vizuálne sledovať a následne ovplyvňovať priebeh cvičenia. Na zvýšenie participácie pri tréningu RATT v pediatrickej rehabilitácii bolo vyvinuté špeciálne prostredie virtuálnej reality (VR).
Virtuálne prostredie systému Lokomat (Augmented Feedback)
Modul VR pre systém Lokomat obsahuje plochú obrazovku umiestnenú v prednej časti Lokomatu. VR v systéme Lokomat vytvára multimodálny feedback systém. Vstupné zariadenie transformuje pohyby pacienta do pohybov virtuálnej postavy vo virtuálnom prostredí. Navyše Lokomat je schopný zobraziť interakciu s objektmi vo virtuálnom prostredí. Počas tréningu sa pacient pohybuje v rôznych typoch virtuálneho prostredia, kde rieši rozličné úlohy, čo zvyšuje možnosť aktívnej participácie detského pacienta v terapeutickom procese. V rámci tréningu môže napríklad zbierať náhodne distribuované objekty v priestore, vyhýbať sa prekážkam, udržiavať určitý smer pohybu. Pohyby dolných končatín detí sú prenesené na pohyb končatín virtuálnej postavy v reálnom čase. Postava sa pohybuje v priestore simultánne s vlastnými pohybmi pacienta. Ak dieťa nemôže priamo kontrolovať pohyby virtuálnych končatín pohybom vlastných končatín, stále je tam prítomná imitácia pohybov končatín prostredníctvom zariadenia (Lokomat®), ktorá sa zobrazuje na obrazovke (obr. 2).

V tejto štúdii bol použitý „Lokomat® augmented feedback”. Tréning v prostredí VR pripomínal počítačovú hru a pozostával z rôznych typov scenérií, kde bolo možné zbierať rozličné náhodne distribuované objekty, ako napr. krabičku s pokladom, mince, snehuliakov, ovečky, psíkov a pod. V ďalšej hre sa deti približovali ku konkrétnym objektom a snažili sa smerovať končatiny virtuálnej postavy doprava a doľava špecifickými pohybmi vlastných končatín. Napr. ak chceli zabočiť doprava, aktivovali viac švihovú fázu pravou DK a viac stojnú fázu ľavou DK. Pre otočenie doľava naopak. Dôležité je, že tieto nástroje VR sú jednoducho ovládateľné a terapeuti sú schopní používať ich po krátkej inštruktáži. Prostredníctvom nastavenia intenzity a úrovne obťažnosti pre každú úlohu, tréning môže byť prispôsobený kognitívnym a motorickým schopnostiam, prípadne špecifickým potrebám každého pacienta. Všetky údaje o výkone sa ukladajú do počítača a terapeut ich môže využiť pre kontrolu, hodnotenie a dokumentáciu pokroku pacienta. Fyzioterapeut má integračnú úlohu pri úvodnom nastavení softvéru a dohliada na priebeh a optimalizáciu terapie.
Intervencia
Pred roboticky asistovanou lokomočnou terapiou pacienti absolvovali konvenčnú rehabilitáciu (Vojtovu metódu reflexnej lokomócie, Bobath koncept, fyzikálnu terapiu – magnetoterapiu, fototerapiu biolaserom a niektorí pacienti aj komplementárne metódy liečebnej rehabilitácie – synergickú reflexnú terapiu, cvičenie na loptách, vodoliečebné procedúry, akupunktúru, hipoterapiu atď.) v rôznych kombináciách a frekvencii podľa druhu zdravotníckeho zariadenia.
Roboticky asistovaná lokomočná terapia v systéme Lokomat® v období trvania štúdie bola základnou (hlavnou) terapeutickou intervenciou u participantov tejto štúdie. Iná pohybová liečba nebola súčasťou programu. Keďže doposiaľ neexistuje všeobecne platné odporúčanie pre aplikáciu RATT u pacientov s DMO, dĺžku trvania terapie a frekvenciu jednotlivých terapeutických jednotiek sme stanovili podľa skúseností a poznatkov zo zahraničných štúdií a taktiež so zreteľom na individuálne možnosti pacienta a jeho rodičov. Pacienti absolvovali 20 terapeutických jednotiek počas štyroch až šiestich týždňov s frekvenciou tri- až päťkrát týždenne. Jedna terapeutická jednotka trvala 55 min. Nastavenie a umiestnenie pacienta do zariadenia v jednotlivých sedeniach trvá približne 15 min, chôdza 30 min. Sňatie pacienta zo zariadenia po terapeutickej intervencii trvá približne 10 min, takže celkové trvanie jednej terapeutickej jednotky je limitované na 55 min. Rýchlosť chôdze sa pohybovala od 1,1 km/ hod (u závažnejšie postihnutých) do 1,7 km/ hod (u miernejšie postihnutých pacientov).
Na zvýšenie motivácie detského pacienta bol vyvinutý program umožňujúci tréning vo virtuálnom prostredí. „Lokomat® augmented feedback” s možnosťou implementácie VR v rámci tréningu chôdze sme zadovážili v r. 2009. Odvtedy prebiehala RATT výlučne v prostredí VR.
Použité testy
Všetky hodnotenia sa uskutočnili do 24 hod pred terapiou a do 24 hod po poslednej terapeutickej jednotke. Pred terapiou boli pacienti štandardne ambulantne vyšetrení. V štúdii používame na evaluáciu motorických funkcií dieťaťa podrobnejšiu 88-položkovú verziu GMFM (Gross Motor Function Measure), ktorá hodnotí motorické schopnosti dieťaťa v piatich dimenziách:
- A – ľah a otáčanie, 17 položiek,
- B – sed, 20 položiek,
- C – lezenie a kľak, 14 položiek,
- D – stoj, 13 položiek,
- E – chôdza, beh a poskoky, 24 položiek [23,24].
Čas chôdze (min), vzdialenosť prejdenú počas jednej terapeutickej jednotky a celkovo (m) a priemernú rýchlosť chôdze (km/ hod) počas každého tréningu vyhodnocuje systém Lokomat®.
Použité štatistické metódy
Dáta sme spracovali pomocou programov MS Office Excel 2007 a SPSS 16.0 for Windows. Súbory dát v našom prípade boli testované na normalitu Kolmogorov‑Smirnovovým testom normality. Keďže v súboroch nebola zachovaná normálna distribúcia dát, bol pre porovnanie vstupných a výstupných hodnôt GMFM v jednotlivých skupinách použitý neparametrický Wilcoxonov test pre párové hodnoty. Pre hodnotenie medziskupinových rozdielov percentuálnych zlepšení v GMFM teste (LOKO vs VR‑LOKO) sme použili Mann‑Whitneyho test dvoch nezávislých súborov. Výsledky sú považované za štatisticky signifikantné pri p < 0,05 a vysoko štatisticky signifikantné, pokiaľ je p < 0,001. Na zistenie vecnej významnosti rozdielov sme použili výpočet Cohenovho koeficientu veľkosti účinku d, s použitím združenej smerodajnej odchýlky. Podľa koncepcie Cohena (1977) boli hodnoty koeficientu d < 0,50 interpretované ako malý účinok faktoru spôsobujúceho rozdiel, hodnoty d = 0,5– 0,8 ako stredne veľký účinok spôsobujúci rozdiel. Hodnoty d > 0,8 predstavujú veľký účinok, resp. vecne významný rozdiel. Cohenov koeficient d sme doplnili výpočtom 95% intervalu spoľahlivosti (CI 95 %).
Výsledky
Hodnotenie zlepšenia motorických funkcií a funkčných parametrov chôdze
Štyridsať dva pacientov s bilaterálne spastickou DMO absolvovalo počas obdobia štyroch až šiestich týždňov s frekvenciou tri- až päťkrát týždenne 20 terapeutických jednotiek roboticky asistovanej lokomočnej terapie v systéme Lokomat®.
Skupina LOKO (n = 16)
Priemerný čas trvania jednej terapeutickej jednotky (TJ) na pacienta bol 34,92 min (SD ± 4,32, v rozpätí 27,07 až 39,36) a priemerná vzdialenosť, ktorú pacienti prešli počas jednej terapeutickej jednotky, bola 739,56 m (SD ± 194,61, v rozpätí 380 až 975). Priemerná celková vzdialenosť na pacienta počas terapie pozostávajúcej z 20 TJ bola 14 999,81 m (SD ± 3 851,67 v rozpätí 8 356 až 19 502) a priemerný celkový čas na pacienta bol 699,59 min (SD ± 93,74 v rozpätí 556,37 až 879,04). Priemerná rýchlosť 1,31 km/ hod (SD ± 0,16 v rozsahu 1,0 až 1,5).
Hodnotené vstupné parametre sa po absolvovaní 20 TJ v skupine LOKO zlepšili nasledovne: signifikantné zlepšenie sme zaznamenali v dimenzii A (ľah, otáčanie) z priemerného 81,62 % (SD ± 17,96 (29,41– 98,04)) na 86,64 % (SD ± 16,19 (41,17– 100)); Z = – 3,308; p = 0,001, čo znamenalo zlepšenie o 5,02 %. V kategórii B (sed) sme evidovali signifikantné zlepšenie o 7,82 % z priemerného 67,91 % (SD ± 27,35 (8,33– 93,33)) na 75,73 % (SD ± 27,88 (13,33– 100)); Z = – 3,526; p = 0,000. Celkové skóre dimenzie C (lezenie, kľačanie) v GMFM vzrástlo signifikantne o 5,99 % z priemerných 64,09 % (SD ± 29,82 (2,38– 97,62)) na 70,08 % (SD ± 29,24 (4,76– 100)); Z = = – 3,192; p = 0,001. Skóre v dimenzii D (stoj) sa zvýšilo signifikantne o 7,21 % z priemerného 34,61 % (SD ± 29,77 (0,00– 92,3)) na 41,82 % (SD ± 34,22 (0,00– 97,43)); Z = – 3,062; p = 0,002. V dimenzii E (chôdza) sme zaznamenali signifikantné zlepšenie o 5,47 % z priemerného 32,63 % (SD ± 27,27 (0,00– 90,27)) na 38,10 % (SD ± 30,63 (0,00– 97,22)); Z = – 2,936; p = 0,003. Celkovo (total GMFM) sme teda zaznamenali zlepšenie o 6,38 % z priemerného 56,21 % (SD ± 24,10 (8,69– 90,24)) na 62,59 % (SD ± 25,35 (11,85– 98,06)); Z = – 3,516; p = 0,000 (graf 1).

Skupina VR‑LOKO (n = 26)
Priemerný čas trvania jednej terapeutickej jednotky (TJ) na pacienta bol 27,87 min (SD ± 3,44 v rozpätí 20,39– 37,56) a priemerná vzdialenosť, ktorú pacienti prešli počas jednej terapeutickej jednotky, bola 572,95 m (SD ± 129,63 v rozpätí 159– 776). Priemerná celková vzdialenosť na pacienta počas terapie pozostávajúcej z 20 TJ bola 11 551,87 m (SD ± 2 742,56 v rozpätí 3 332– 15 521) a priemerný celkový čas na pacienta bol 565,37 min (SD ± 84,86 v rozpätí 392,24– 758,41). Priemerná rýchlosť bola 1,32 km/ hod (SD ± 0,14 v rozsahu 1,1– 1,5).
Po absolvovaní 20 TJ roboticky asistovanej lokomočnej terapie v skupine VR‑LOKO sme zaznamenali signifikantné zlepšenie v dimenzii A (ľah, otáčanie) z priemerného 72,61 % (SD ± 17,01 (35,29– 100)) na 85,89 % (SD ± 12,61 (52,94– 100)); Z = – 4,109; p = 0,000, čo znamenalo zlepšenie o 13,28 %. V kategórii B (sed) došlo k signifikantnému zlepšeniu o 12,47 % z priemerného 58,39 % (SD ± 26,35 (1,66– 95,00)) na 70,86 % (SD ± 22,51 (21,66– 96,66)); Z = – 4,375; p = 0,000. Celkové skóre dimenzie C (lezenie, kľačanie) v GMFM vzrástlo signifikantne o 10,81 z priemerného 55,03 (SD ± 28,13 (2,38– 5,24)) na 65,84 (SD ± 28,03 (4,76– 100,00)); Z = = – 4,109; p = 0,000. Skóre v dimenzii D(stoj) sa zvýšilo signifikantne o 7,89 % z priemerného 27,41 % (SD ± 29,06 (0,00– 89,74)) na 35,30 % (SD ± 31,98 (0,00– 94,87)); Z = – 3,943; p = 0,000. V dimenzii E (chôdza) sme zaznamenali signifikantné zlepšenie o 6,73 % z priemerného 23,98 % (SD ± 26,42 (0,00– 86,11)) na 30,71 % (SD ± 29,02 (0,00– 97,22)); Z = – 4,017; p = 0,000. Celkovo (GMFM total) sme teda zaznamenali zlepšenie o 10,22 % z priemerného 47,49 % (SD ± 22,94 (11,64– 87,94)) na 57,71 % (SD ± 22,26 (16,98– 94,78)); Z = – 4,457; p = 0,000 (graf 2).

Porovnaním priemerných zlepšení (%)hodnotených parametrov po 20 TJ u oboch skupín sme dokumentovali štatisticky signifikantný rozdiel (na hladine štatistickej významnosti 0,01 a 0,05) v dimenzii A, C a celkovom zlepšení v teste GMFM v prospech skupiny VR‑LOKO. V dimenzii B, D a E bolo zlepšenie výraznejšie taktiež v skupine VR‑LOKO, avšak rozdiel nedosiahol štatistickú významnosť (graf 3).

Výpočtom Cohenovho koeficientu veľ-kosti účinku sme dokumentovali, že štatistická významnosť je sprevádzaná vecnou významnosťou v dimenzii A (Z = – 2,793, p = 0,005, d = 1,09), v dimenzii C (Z = – 1,963, p = 0,05, d = 0,65) a v celkovom skóre GMFM (Z = – 2,305, p = 0,021, d = 0,78) (tab. 3). V dimenziách (D, E) zlepšenie nedosiahlo vecnú významnosť, effect size bol malý.

Diskusia
Cieľom štúdie bolo posúdiť možnosť ovplyvnenia motorických funkcií prostredníctvom RATT v závislosti od implementácie prostredia virtuálnej reality. Zároveň sme chceli determinovať vplyv roboticky asistovanej lokomočnej terapie v systéme Lokomat® na motorické funkcie u detí s DMO.
Predpokladali sme, že po absolvovaní 20 TJ dôjde u pacientov s DMO k zlepšeniu motorických funkcií hodnotených testom GMFM. Taktiež sme predpokladali, že toto zlepšenie bude výraznejšie v skupine, kde bol do terapie zakomponovaný „augmented feedback” v prostredí VR.
Je potrebné poznamenať, že naša štúdia je limitovaná niekoľkými faktormi. Skupina detí bola heterogénna, čo sa týka veku a miery postihnutia. Snažili sme sa eliminovať biomechanický vplyv rastovej akcelerácie na funkcie hrubej motoriky, a preto sme do štúdie zahrnuli deti do 12,9 rokov. Počas štúdie sme sa pokúsili uskutočniť testovanie tými istými testujúcimi fyzioterapeutmi, avšak z organizačných dôvodov sa to nedalo dosiahnuť vo všetkých prípadoch. Počet detí v skupinách, ktoré sme porovnávali, nebol rovnako veľký a zastúpenie závažnosti postihnutia bolo nerovnomerné. Vychádzali sme z faktu, že do r. 2009 sme nemali možnosť aplikovať VR v rámci tréningu RATT (skupina LOKO). „Lokomat® augmented feedback“ so zakomponovaným prostredím VR sme nainštalovali až v r. 2009 a odvtedy ho využívame automaticky pri každom tréningu (skupina VR‑LOKO). Táto skutočnosť rozhodla o randomizácii.
Taktiež nemôžeme vylúčiť vplyv prirodzeného pokračovania vývoja dieťaťa vo výsledkoch. Existujú však dôkazy, že nedochádza k signifikantným zmenám v prirodzenom vývoji v dimenzii D a E GMFM u detí a adolescentov s DMO počas sledovaného obdobia troch až šiestich týždňov bez terapeutickej intervencie [27– 29].
Hodnotenie zlepšenia motorických funkcií a funkčných parametrov chôdze
V našej štúdii sme po absolvovaní 20 TJ v systéme Lokomat® zaznamenali v hodnotených parametroch – GMFM A, B, C, D, E a total GMFM štatisticky signifikantné zlepšenie (p < 0,001) vo všetkých uvedených položkách. Toto zlepšenie sme potvrdili už v našej predchádzajúcej štúdii, kde sme zároveň poukázali na zlepšenie funkčných parametrov chôdze po RATT. Taktiež sme dokumentovali vplyv závažnosti postihnutia na mieru zlepšenia motorických funkcií [30].
Zlepšenie stereotypu chôdze a jej funkčných parametrov zapadá do konceptu cieleného motorického učenia. Podobné výsledky zaznamenali tiež vo svojich prácach Meyer‑Heim et al [12,18] a Borggraefe et al [2,17], ktorí testovali dimenziu D, E, rýchlosť chôdze a výdrž pri chôdzi po absolvovaní terapie v systéme Lokomat®. Nárast rýchlosti chôdze a výdrže pri chôdzi vo svojich prácach zaznamenali aj Patritti et al [31], Sicari et al [32] a Montinaro et al [33]. Montinaro et al [33] porovnávali výsledky terapie v systéme Lokomat® s tradičnou fyzioterapiou. Z dokumentovaných hodnôt vyplýva trend prevahy v zlepšení parametrov chôdze po absolvovaní roboticky asistovanej terapie v systéme Lokomat®.
Uvedené parametre hodnotí väčšina autorov zaoberajúcich sa tréningom chôdze. Počas terapie sme však evidovali aj výrazné zlepšenie v dimenzii A (ľah, otáčanie), B (sed), C (lezenie, kľak) v GMFM teste, čo predpokladá aditívny priaznivý efekt terapie na stabilizáciu svalstva trupu.
Aj keď pôvodným zámerom a cieľom RATT bolo zlepšenie lokomočných funkcií a zlepšenie stereotypu chôdze – čo by podporilo teóriu motorického učenia opakovaním pohybov, evidovali sme tiež signifikantné zlepšenie funkcie trupového svalstva a uvoľnenie svalového napätia flexorových skupín na DK.
Výraznejšie zlepšenie v stabilizácii trupového svalstva sme pozorovali u pacientov, ktorí trénovali v prostredí VR. Vzpriamené držanie hlavy facilitované optickou stimuláciou prostredníctvom VR podmieňuje stabilizáciu trupového svalstva vo vertikále multisenzorickou integráciou aferentných vstupov, čo koreluje s konceptom posturálnej ontogenézy [34].
Zmeny v motorických funkciách, ktoré sme zaznamenali u našich pacientov, potvrdzujú fakt, že skutočné vzpriamenie je možné až vtedy, keď prevládne vplyv centrálnych riadiacich úrovní, ktorý umožní posturálnu stabilizáciu vo vertikále. Neurofyziologický hierarchický koncept, podľa ktorého v priebehu vývoja dieťaťa pozvoľne nastupuje vplyv mozgovej kôry potláčajúcej prejavy spinálnych a subkortikálnych reflexov, sa odráža aj v experimentálnych prácach iných autorov [35].
Hodnotenie vplyvu VR na zlepšenie motorických funkcií
Významným faktorom úspechu terapie je spolupráca a aktívna participácia pacienta. Ako uvádza Koenig et al [20] a ako sme aj my pozorovali počas trvania štúdie, implementácia kontrolných stratégií a adaptovaného biofeedback systému pre deti je dôležitým faktorom pri získaní ich maximálnej participácie, ktorú významne uľahčujú v Lokomate® integrované technológie umožňujúce chôdzu vo virtuálnej realite. V našej štúdii sme porovnaním priemerných zlepšení hodnotených parametrov (GMFM) po 20 terapeutických jednotkách roboticky asistovanej lokomočnej terapie dokumentovali výraznejšie zlepšenie motorických funkcií v skupine pacientov, ktorí trénovali v prostredí VR.
Aj keď sa už dlhodobo predpokladá, že motivácia zohráva v rehabilitačnom procese významnú úlohu, jednoznačná definícia tohto fenoménu nebola popísaná [36,37]. Motivácia sa popisuje obvykle ako nekonštantný faktor. Ide skôr o dynamický proces, ktorý je závislý na mnohých externých a interných podmienkach. Častokrát sa aktívna participácia stotožňuje s motiváciou a podobne pasivita s nedostatkom motivácie [37].
V niektorých zahraničných centrách sa pokúšali udržať koncentráciu detského pacienta a eliminovať pocit nudy pri roboticky asistovanom tréningu rozprávkami na DVD prehrávači. Tieto stratégie v konečnom dôsledku viedli k odpútaniu pozornosti a následne k úplnej pasivite. Tréning v prostredí VR ponúka účinnú terapeutickú možnosť vo funkčnom, zmysluplnom a motivujúcom kontexte [21].
Aj keď ešte nie je dostatočne známy proces neurónových mechanizmov obnovy lokomócie, VR by mohla mať vplyv cielene na neuronálnu reorganizáciu a urýchliť proces reedukácie motorických funkcií [38,39]. You et al [39] prostredníctvom fMR preukázali, že VR indukuje kortikálnu reorganizáciu asociovanú s obnovou lokomočných funkcií u pacientov po CMP. Mirelmann et al [40] v randomizovanej klinickej štúdii demonštrovali u pacientov s chronickou hemiparézou po CMP, že roboticky asistovaný tréning prevádzaný v sede (Rutgers Ankle Rehabilitation System) s využitím prostredia VR výraznejšie zlepšuje rýchlosť chôdze, výdrž pri chôdzi a toleranciu záťaže v porovnaní so skupinou pacientov, ktorí trénovali bez VR. Pacienti v oboch skupinách prevádzali pohyby v členkovom kĺbe do dorziflexie, plantárnej flexie, inverzie, everzie a kombinované pohyby.
Hoci u detí s DMO je proces motorického učenia podstatne odlišný v porovnaní s pacientmi po NCMP alebo SCI či TBI, ktorí mali intaktný CNS pred poškodením, ukázalo sa, že aktívny, cielený, na úlohu orientovaný tréning je kľúčovým aspektom aj v liečbe detí s DMO [41,42]. V dostupnej literatúre doposiaľ nebol hodnotený vplyv aplikácie VR na celkové zlepšenie motorických funkcií u pacientov s DMO. Brütsch et al a Schuler et al [19,22,43] vo svojich štúdiách skúmali okamžitý efekt vplyvu prostredia VR na aktívnu participáciu pacienta počas roboticky asistovanej lokomočnej terapie.
Brütsch et al [19,22] v skupine detí s rôznymi neurologickými ochoreniami zaznamenali bezprostredný nárast motorickej aktivity vyjadrený prostredníctvom biofeedback systému integrovanom v Lokomate. Počas roboticky asistovaného lokomočného tréningu s prostredím VR bola zaznamenávaná okamžitá motorická odpoveď (švihová fáza pri kopnutí do virtuálnej lopty). Inštalovaná bola scenéria futbalového ihriska, v ktorom pacient prostredníctvom virtuálnej postavy kopal do futbalovej lopty. Výkon bol hodnotený váženým súčtom interakčných síl medzi pacientom a systémom Lokomat, ktorý sa vypočítaval pre stojnú a krokovú fázu. Schuler et al [43] tieto zistenia podporili verifikáciou prostredníctvom povrchovej EMG. Elektromyograficky zaznamenaná aktivita u pacientov s DMO bola signifikantne vyššia počas tréningu v prostredí VR v porovnaní s normálnymi podmienkami tréningu chôdze.
Vo vyššie spomínaných štúdiách [19,22, 43] bol zároveň zaznamenaný nárast motorickej aktivity u pacientov pri povzbudzovaní a motivujúco‑inštruktívnom vedení fyzioterapeuta. Tieto zistenia poukázali na potrebu prítomnosti terapeuta pri motivácii dieťaťa. Jeho aktívna prítomnosť je výhodou pri RATT v porovnaní s manuálne asistovaným tréningom chôdze, kde sa viacerí terapeuti (minimálne dvaja) musia koncentrovať na správne vedenie pohybov DK pacienta. Počas tréningu s DGO terapeut môže poskytnúť verbálne inštrukcie na posilnenie jednotlivých svalových skupín a priebežne korigovať postúru a stereotyp chôdze pacientov. V našej štúdii sme povzbudzovanie a inštrukcie fyzioterapeutom prirodzene zakomponovali do priebehu tréningu v oboch skupinách. Sociálna interakcia medzi terapeutom a pacientom je nenahraditeľná a nepochybne zohráva kľúčovú úlohu predovšetkým pre pacienta. VR by nemala byť považovaná za náhradu terapeuta, ale ako ďalší prostriedok na zefektívnenie tréningu.
Deti považovali tréning vo VR za motivujúci, zábavný a cítili sa schopné a sebestačné v plnení úloh. Tieto zistenia podporili aj štúdie, v ktorých autori prostredníctvom rôznych typov dotazníkov špecificky hodnotili pozornosť, motiváciu, zaujímavosť a pocit radosti počas terapie [19,20,22,43].
Výsledky poukazujú na koreláciu medzi motiváciou, vynaloženým úsilím a pocitom zábavy (dotazníkový prieskum) a behaviorálnymi indikátormi (svalová aktivita) [43].
Iné aspekty RATT
Niekoľko štúdií sa tiež zaoberalo pretrvávaním dosiahnutých výsledkov roboticky asistovaného tréningu chôdze. Z recentných štúdií a publikovaných prác vyplýva, že dosiahnutý efekt terapie pretrváva po dobu minimálne štyroch mesiacov [17,18,31,33].
Zlepšenie vo výsledných meraniach preukázané v nami prezentovanej štúdii bolo konzistentné s referenciami pacientov, rodičov a opatrovateľov, ktorí väčšinou zaznamenali väčšiu výdrž, vytrvalosť, zlepšenie schopnosti chodiť po schodoch a celkové zlepšenie mobility detí a adolescentov po terapii v systéme Lokomat® pri vykonávaní bežných denných aktivít v rôznych polohách (sed, stoj, ľah).
Taktiež evidovali zlepšenie transferov, či už za pomoci bariel, chodítka, s asistenciou druhej osoby alebo aj iným spôsobom. U participantov neboli zaznamenané nijaké vedľajšie nežiaduce účinky.
Záver
V sledovanom súbore pacientov tejto štúdie došlo po štyroch až šiestich týždňoch trvania terapie v systéme Lokomat® k štatisticky vysoko signifikantnému zlepšeniu motorických funkcií hodnotených testom GMFM (dimenzia A, B, C, D, E, total). Stabilizácia trupového svalstva predchádzajúca zlepšeniu v parametroch stoja a chôdze poukazuje na platnosť neurovývojového konceptu, ktorý vychádza z ontogenézy dieťaťa.
Aplikácia VR počas RATT mala pozitívny vplyv na vôľovú hybnosť detí s DMO. Podľa predpokladu sme u pacientov trénujúcich v prostredí VR (skupina VR‑LOKO) zaznamenali výraznejšie zlepšenie motorických funkcií v porovnaní s jednoduchým RATT (skupina LOKO).
Tréning chôdze v systéme Lokomat® je bezpečný [44], jednoducho realizovateľný a dobre tolerovaný u sledovanej skupiny (chodiacich aj nechodiacich) pacientov s DMO bez nežiaducich účinkov.
Roboticky asistovaný lokomočný tréning v prostredí VR bol úspešne integrovaný do rehabilitačného programu detí, adolescentov a dospelých pacientov s DMO ako jedna z možností zvýšenia participácie v motorickej aktivite a výsledky preukázali zlepšenie lokomočných funkcií.
Autoři deklarují, že v souvislosti s předmětem studie nemají žádné komerční zájmy.
Redakční rada potvrzuje, že rukopis práce splnil ICMJE kritéria pro publikace zasílané do biomedicínských časopisů.
MUDr. Stanislava Klobucká, PhD.
Rehabilitačné centrum Harmony
Kudlákova 2
841 01 Bratislava
e-mail: stanislavaklobucka@gmail.com
Prijaté k recenzii: 24. 4. 2013
Prijaté do tlače: 12. 6. 2013
Zdroje
1. Kraus J. Dětská mozková obrna. Neurol Prax 2011; 12(4): 219– 220.
2. Borggraefe I, Schaefer JS, Klaiber M, Dabrowski E, Ammann‑Reiffer C, Knecht B et al. Robotic‑assisted treadmill therapy improves walking and standing performance in children and adolescents with cerebral palsy. Eur J Pediatr Neurol 2010; 14(6): 496– 502.
3. Cazalets JR, Borde M, Clarac F. Localization and Organization of the Central Pattern Generator for Hindlimb Locomotion in Newborn Rat. J Neurosci 1995; 15(7): 4943– 4951.
4. Duysens J, Van de Crommert H. Neural control of locomotion Part 1: The central pattern generator from cats to humans. Gait Posture 1998; 7(2): 131– 141.
5. Mac Kay‑Lyons M. Central pattern generation of locomotion: a review of evidence. Phys Ther 2002; 82(1): 69– 83.
6. Borggraefe I, Meyer‑Heim A. Kumar A, Schaefer JS,Berweck S, Heinen F. Improved Gait Parameters After Robotic‑Assisted Locomotor Treadmill Therapy in a 6- Year‑Old Child with Cerebral Palsy. Movement Dis 2008; 23(2): 280– 283.
7. Dietz V, Müller R, Colombo G. Locomotor activity in spinal man: significance of afferent input from joint and load receptors. Brain 2002; 125(12): 2626– 2634.
8. Kříž J, Káfuňková P, Schreier B, Kolář P. Trénink lokomoce v závěsu u pacientů po poranění míchy. Cesk Slov Neurol N 2010; 73/ 106(2): 124– 130.
9. Hornby TG, Zemon DH, Campbell D. Robotic assisted, Body‑Weight‑Supported Treadmill Training in Individuals Following Motor Incomplete Spinal Cord Injury. Phys Ther 2005; 85(1): 52– 66.
10. Husemann B, Müller F, Krewer C, Heller S, Koenig E.Effects of locomotion training with assistance of robot‑driven gait orthosis in hemiparetic patients after stroke. Stroke 2007; 38(2): 349– 354.
11. Mayr A, Kofler M, Quirbach E, Matzak H, Fröhlich K,Saltuari L. Prospective, blinded, randomized crossover study of gait rehabilitation in stroke patients using the Lokomat gait orthosis. Neurorehab Neural Re 2007; 21(4): 307– 314.
12. Meyer‑Heim A, Ammann‑Reiffer C, Schmartz A, Schäfer J, Sennhauser FH, Heinen F et al. Improvement of walking abilities after robotic‑assisted locomotion training in children with cerebral palsy. Arch Dis Child 2009; 94(8): 615– 620.
13. Westlake KP, Patten C. Pilot study of Lokomat versus manual‑assisted treadmill training for locomotor recovery post‑stroke. J Neuroeng Rehabil 2009; 6: 18.
14. Wirtz M, Zemon DH, Rupp R, Scheel A, Colombo G,Dietz V et al. Effectiveness of automated locomotor training in patients with chronic incomplete spinal cord injury: a multicenter trial. Arch Phys Med Rehabil 2005; 86(4): 672– 680.
15. Beer S, Aschbacher B, Manoglou D, Gamper E, Kool J, Kesselring J. Robot‑assisted gait training in multiple sclerosis: a pilot randomized trial. Mult Scler 2008; 14(2): 231– 236.
16. Ustinova K, Chernikova L, Bilimenko A, Telenkov A,Epstein N. Effect of robotic locomotor training in an individual with Parkinson‘s disease: a case report. Disabil Rehabil Assist Technol 2011; 6(1): 77– 85.
17. Borggraefe I, Kiwull L, Schaefer JS, Koerte I, Blaschek A, Meyer‑Heim A et al. Sustainability of motor performance after robotic‑assisted treadmill therapy in children: an open, non randomized baseline – treatment study. Eur J Phys Rehabil Med 2010; 46(2): 125– 131.
18. Meyer‑Heim A, Borggraefe I, Ammann‑Reiffer C, Berweck S, Sennhauser FH, Colombo G et al. Feasibility of robotic assisted locomotor training in children with central gait impairment. Dev Med Child Neurol 2007; 49(12): 900– 906.
19. Brütsch K, Schuler T, Koenig A, Zimmerli L, Mérillat S, Lünenburger L et al. Influence of virtual reality soccer game on walking performance in robotic assisted gait training for children. J Neuroeng Rehabil 2010; 7: 15.
20. Koenig A, Brütsch K, Zimmerli L, Guidali M, Duschau‑Wicke A. Virtual environments increase participation of children with cerebral palsy in robot‑aided treadmill training. Virtual Rehabilitation [on-line]; Available from URL: http:/ / ecollection.ethbib.ethz.ch/ eserv.php?pid=eth:1513&dsID=eth‑1513– 01.pdf.
21. Holden MK. Virtual environments for motor rehabilitation: review. Cyberpsychol Behav 2005; 8(3): 187– 211.
22. Brütsch K, Koenig A, Zimmerli L, Mérillat S, Riener R, Jäncke L et al. Virtual reality for enhancement of robot‑assisted gait training in children with neurological gait disorders. J Rehabil Med 2011; 43(6): 493– 499.
23. Russell DJ, Rosenbaum PL, Cadman DT, Gowland C,Hardy S, Jarvis S. The gross motor function measure: A means to evaluate the effects of physical therapy. Dev Med Child Neurol 1989; 31(3): 341– 352.
24. Russell D, Rosenbaum PL, Avery LM, Lane M.Gross Motor Function Measure (GMFM‑66 & GMFM‑ -88) User’s Manual. Clinics in Developmental Medicine No. 159. London: Mac Keith Press 2002.
25. Palisano R, Rosenbaum P, Walter S, Russell D, Wood E, Galuppi B. Development and reliability of a system to classify gross motor function in children with cerebral palsy. Dev Med Child Neurol 1997; 39(4): 214– 223
26. Kraus J et. al. Dětská mozková obrna. 1st ed, Praha: Grada Publishing 2005.
27. Cherng RJ, Liu CF, Lau TW, Hong RB. Effect of treadmill training with body weight support on gait and gross motor function in children with spastic cerebral palsy. Am J Phys Med Rehabil 2007; 86(7): 548– 555.
28. Knox V, Evans, AL. Evaluation of the functional effects of a course of Bobath therapy in children with cerebral palsy: a preliminary study. Dev Med Child Neurol 2002 ; 44(7): 447– 460.
29. Hanna SE, Bartlett DJ, Rivard LM, Russel DJ. Reference curves for the gross motor function measure: percentiles for clinical description and tracking over time among children with cerebral palsy. Phys Ther 2008; 88(5): 596– 607.
30. Klobucká, S, Kováč, M, Žiaková, E. Improvement of Gait and postural functions after robotic‑assisted treadmill training (RATT) in patients with bilateral spastic cerebral palsy. Proceeding of the XXth World Congress of Neurology, With Africa, for Africa Marrakesh, Maroko, 2011 Nov 12– 17. [Abstract book CD‑ ROM]. 2011.
31. Patritti B, Sicari M, Deming M. Enhancement and retention of locomotor function in children with cerebral palsy after robotic gait training. Gait Posture 2009; 30 (Suppl 2): S9– S10.
32. Sicari M, Patritti B, Deming LC, Romaguera F, Pelliccio M, Benedetti MG et al. Robotic gait training in children with cerebral palsy: A case series. Gait Posture 2009; 30 (Suppl 1): S2.
33. Montinaro A, Piccinini L, Romei M, Bo I, Molteni F,Turconi AC et al. Robotic‑assisted locomotion training in children affected by Cerebral Palsy. Gait Posture 2011; 33 (Suppl 1): S55– S56.
34. Vojta V. Cerebrálne poruchy pohybového ústrojenstva v dojčenskom veku – včasná diagnóza a včasná liečba. 1st ed. Bratislava: MK3 1993.
35. Kolář P et al. Rehabilitace v klinické praxi. Praha: Galén 2009.
36. MacLean N, Pound P. A critical review of the concept of patient motivation in the literature on physical rehabilitation. Soc Sci Med 2000; 50(4): 495– 506.
37. Colombo R, Pisano F, Mazzone A, Delconte C, Micera S, Carroza MC et al. Design strategies to improve patient motivation during robot‑aided rehabilitation. J Neuroeng Rehabil 2007; 4: 3.
38. Merians AS, Tunik E, Adamovich SV. Virtual reality to maximize function for hand and arm rehabilitation: exploration of neural mechanisms. Stud Health Technol Inform 2009; 145: 109– 125.
39. You SH, Jang SH, Kim YH, Hallett M, Ahn SH, Kwon YH et al. Virtual reality‑induced cortical reorganization and associated locomotor recovery in chronic stroke: an experimenter‑blind randomized study. Stroke 2005; 36(6): 1166– 1171.
40. Mirelman A, Bonato P, Deutsch JE. Effect of training with robot‑virtual reality system compared with robot alone on the gait of individuals after stroke. Stroke 2008; 40(1): 169– 174.
41. Damiano DL. Activity, activity, activity: rethinking our physical therapy approach to cerebral palsy. Phys Ther 2006; 86(11): 1534– 1540.
42. Papavasiliou AS. Management of motor problems in cerebral palsy: a critical update for the clinician. Eur J Paediatr Neurol 2009; 13(5): 387– 396.
43. Schuler T, Brütsch K, Müller R, Van Hedel H, Meyer‑Heim A. Virtual realities as motivational tools for robotic assisted gait training in children: A surface electromyography study. NeuroRehabilitation 2011; 28(4): 401– 411.
44. Borggraefe I, Klaiber M, Schuler T, Warken B, Schroeder SA, Heinen F et al. Safety of robotic‑assisted treadmill therapy in children and adolescents with gait impairment: a bi‑centre survey. Dev Neurorehabil 2010; 13(2): 114–119.
Štítky
Dětská neurologie Neurochirurgie NeurologieČlánek vyšel v časopise
Česká a slovenská neurologie a neurochirurgie

2013 Číslo 6
Nejčtenější v tomto čísle
- Frontotemporálna lobárna degenerácia z pohľadu nových klinicko‑patologických korelácií
- Tuberózní skleróza u dětí sledovaných od novorozeneckého věku pro prenatální nález rhabdomyomů srdce – dvě kazuistiky
- Expanze pineální krajiny
- Zlomeniny kondylu okciputu