
Interindividuální variabilita provádění Sémontova repozičního manévru
Inter-individual Variability in Processing of the Sémont Liberatory Manoeuvre
Aim:
Sémont liberatory manoeuvre is used in the treatment of posterior semicircular canal in patients with benign paroxysmal positional vertigo. The aim of the study was to determine the inter-individual and intra-individual variability in the processing of the manoeuvre and to define the parameters that affect it the most.
Methods:
Three experienced therapists applied the manoeuvre bilaterally in 10 healthy probands. Inertial measurement unit consisting of the accelerometer and gyroscope recorded the trajectory and speed. Angle changes were placed in the coordinate reference system. Accuracy of the manoeuvre was evaluated based on the deviations from the projected sensory plane.
Results:
Parameters affecting the accuracy of the manoeuvre included height of a proband (p = 0.0252), phase of the movement (p < 0.0001), therapist and the side of the movement. The effect of these factors is the most pronounced when combined. We assessed interactions of the phase of the movement and the height of the probands (p = 0.0130), the therapist and the phase of movement (p = 0.0001), the therapist and the height of the probands (p < 0.0252). The largest magnitude of deviation from the sensory plane was in the range of –37.17° to 31° with a standard deviation of 16.6°.
Conclusions:
The data highlight high variability in the implementation of the Sémont liberatory manoeuvre, whether measurements by a single therapist or inter-individually between the therapists are compared. Analysis of the impact of these deviations on therapeutic efficacy in patients with benign paroxysmal positional vertigo and detailed analysis of influencing parameters should be the subject of further research.
Key words:
benign positional paroxysmal vertigo – variability – Sémont liberatory manoeuvre
The authors declare they have no potential conflicts of interest concerning drugs, products, or services used in the study.
The Editorial Board declares that the manuscript met the ICMJE “uniform requirements” for biomedical papers.
Autoři:
M. Stehlíková 1; O. Čakrt 1; I. Bodlák 2; Z. Čada 3
![]() ; R. Černý 4; J. Jeřábek 4
; R. Černý 4; J. Jeřábek 4
Působiště autorů:
Klinika rehabilitace a tělovýchovného lékařství 2. LF UK a FN v Motole, Praha
1; Princip a. s., Praha
2; Klinika otorinolaryngologie a chirurgie hlavy a krku 1. LF UK a FN v Motole, Praha
3; Neurologická klinika 2. LF UK a FN v Motole, Praha
4
Vyšlo v časopise:
Cesk Slov Neurol N 2015; 78/111(1): 38-43
Kategorie:
Původní práce
doi:
https://doi.org/10.14735/amcsnn201538
Souhrn
Cíl:
Sémontův repoziční manévr se v praxi užívá k léčbě pacientů s benigním paroxyzmálním polohovým vertigem zadního polokruhového kanálku. Cílem studie bylo zhodnotit interindividuální a intraindividuální variabilitu při provádění tohoto manévru a definovat parametry, které jeho provedení nejvíce ovlivňují.
Metody:
Tři zkušení terapeuti provedli manévr oboustranně u 10 zdravých jedinců. Inerciální měřicí jednotka složená z akcelerometru a gyroskopu získávala informace o trajektorii pohybu hlavy v prostoru a její rychlosti. Úhlové změny byly zaznamenány v souřadnicovém referenčním systému. Z odchylek od uvažované roviny polokruhového kanálku byla vyhodnocena data o přesnosti provedení manévru.
Výsledky:
Parametry ovlivňujícími přesnost manévru jsou výška probanda (p = 0,0252), fáze pohybu (p < 0,0001) a dále terapeut a strana pohybu, přičemž tyto faktory vykazují vliv především ve své interakci. Byl hodnocen vztah fáze pohybu k výšce probandů (p = 0,0130), terapeuta k fázi pohybu (p = 0,0001), terapeuta k výšce probandů (p < 0,0252). Největší zaznamenaný rozsah odchylky od senzorické roviny byl v rozmezí – 37,17° až 31° se standardní odchylkou 16,6°.
Závěry:
Získaná data poukazují na překvapivě vysokou variabilitu při provádění Sémontova manévru ať v porovnání mezi jednotlivými měřeními u jednoho terapeuta nebo v porovnání mezi terapeuty. Analýza vlivu těchto odchylek na úspěšnost terapie benigního polohového paroxyzmálního vertiga a bližší analýza ovlivňujících parametrů by měly být předmětem dalšího výzkumu.
Klíčová slova:
benigní polohové paroxyzmální vertigo – variabilita – Sémontův repoziční manévr
Úvod
Benigní polohové paroxyzmální vertigo (BPPV) je nejčastější příčina epizodické závrati [1]. Některá specializovaná pracoviště zabývající se poruchami vestibulárního systému uvádí frekvenci výskytu až u 20 % pacientů trpících závratěmi [2]. U geriatrických pacientů může být výskyt až u 46,5 % [3]. Nejčastěji bývá postižen zadní polokruhový kanálek (Posterior Semicircular Canal; PSC). Důvodem je patrně jeho postavení v prostoru vůči gravitaci, které je ve většině poloh denního režimu nejnižším místem labyrintu [4]. Patofyziologie tohoto onemocnění je vysvětlována uvolněním otokonií z utrikulu a jejich přesunem do PSC. Pohyb hlavy v rovině kanálku vede k pohybu otokonií v endolymfě a urychlení proudění endolymfy semicirkulárního kanálku s vychýlením crista ampularis. V poloze, kdy je postižený kanálek v rovině působení gravitačních sil, dojde k jeho aktivaci a k rozvoji epizodického vertiga. K diagnostice BPPV používáme Dix‑ Hallpikeův test, při kterém vyvoláme charakteristický polohovací nystagmus bijící k postiženému uchu [5].
Přestože u většiny pacientů mohou obtíže odeznít spontánně, k tomu však dochází za relativně dlouhou dobu, repoziční manévry signifikantně urychlují léčbu onemocnění a návrat k běžnému životu [6,7]. Představují jedinou léčebnou metodu splňující kritéria A skupiny evidence based medicine. Cílem repozičních manévrů je přemístění otokoniální hmoty z lumina postiženého polokruhového kanálku zpět do utrikulu. Pro léčbu BPPV zadního polokruhového kanálku v klinické praxi nejčastěji používáme dva základní repoziční manévry. Jednak je to Epleyho manévr (v americké literatuře bývá někdy nazýván CRT, particle reposition procedure), jednak Sémontův repoziční manévr (SM) [1,8,9]. Medikamentózní léčba je u pacientů s BPPV považována za doplňkovou [10].
V klinické praxi někteří autoři uvádějí použití režimových opatření k prevenci recidivy onemocnění [11]. Řada studií však nutnost opatření vyvrátila [7,12,13]. Byl prokázán pouze negativní vliv spánku na postiženém uchu [14,15], který by mohl dle Shima et al být i jedním z faktorů ovlivňujících patofyziologii vzniku BPPV [16].
Sémont doporučil opakovat manévr třikrát během jednoho sezení [7]. V průběhu týdne po provedení repozice může až u 30 % pacientů BPPV recidivovat [17]. Další opakování se řídí přetrváváním polohovacího nystagmu a závrati po provedení Dix‑ Hallpikeova testu, který se může opakovat nejdříve 24 hod po první terapii. Úspěšnost eliminace závratí nad 90 % je srovnatelná u obou manévrů i mezi různými terapeuty [1,18]. Závisí jednak na správném nastavení hlavy (roviny postiženého kanálku) do osy pohybu těla, jednak na rychlosti změny polohy těla, která zaručí dostatečné zrychlení endolymfě a volně plovoucím otokoniím [19]. Tyto dvě zásady jsou považovány za nejdůležitější pro techniku SM.
Neexistuje však žádná studie, která by se věnovala faktorům, jež mohou ovlivňovat reálnou přesnost provádění repozičního manévru. Cílem této studie bylo zjistit přesnost provedení Sémontova manévru u terapeutů, kteří mají srovnatelné terapeutické výsledky u BPPV. Zajímalo nás, o kolik se provádění manévru u konkrétního terapeuta odchyluje od ideálu, zda se tato chyba mění, případně v závislosti na čem se mění, a jestli různí terapeuti provádějí manévr srovnatelně, tzn. zda jsou vzájemně zastupitelní.
Soubor a metodika
Terapeuti a probandi
Studie byla provedena v souladu s etickými standardy příslušné komise (institucionální a národní) odpovědné za provádění klinických studií a Helsinskou deklarací z roku 1975, revidovanou v roce 2000. Účastnili se jí tři zkušení terapeuti T1– T3 s různou délkou praxe (T1 – 1 rok, T2 – 25 let, T3 – 5 let). Všichni rutinně provádějí SM při terapii pacientů s BPPV se srovnatelným účinkem. Každý terapeut provedl SM na identické skupině 10 zdravých probandů (dva muži a osm žen) o průměrné výšce 173,7 cm (min. 159 cm, max. 192 cm), průměrné váze 69,7 kg (min. 53 kg, max. 85 kg) a věku 23,3 let (min. 22 let, max. 25 let). Manévry byly prováděny v klidné místnosti s polohovatelným lehátkem za asistence dalšího terapeuta, který kalibroval a ovládal systém na počítači a podával informace o času setrvání v jednotlivých polohách.
Inerciální měřicí jednotka
Měřicí jednotka byla umístěna na kraniometrický bod ophryon a byla zajištěna elastickou nastavitelnou čelenkou k zabránění pohybu jednotky. Pro účely studie byl pohyb hlavy snímán inerciální měřicí jednotkou WMS 3.0 firmy Princip a.s., Praha. Tato jednotka pro měření pohybu využívá kombinaci trojosého akcelerometru a trojosého gyroskopu. V obou případech se jedná o senzory založené na technologii MEMS (Micro‑Electro‑Mechanical Systems) vyrobené firmou ST Microelectronics. Měřicí jednotka je napájena z interní baterie a v reálném čase vysílá bezdrátově naměřená data do přijímače připojeného k počítači. Vzorkovací frekvence jednotky je 50 Hz. Zrychlení měřené akcelerometrem je ± 2 g. Rozsah úhlové rychlosti měřené použitým gyroskopem je ± 2 000°/ s.
Gyroskop je citlivý na rychlost rotace objektu. Jeho měření lze proto použít pro úpravu informace o postavení jednotky vzhledem k předchozí známé poloze. Z jeho měření ale nelze získat absolutní postavení jednotky.
Akcelerometr je senzor měřící zrychlení – tedy změnu posuvného pohybu jednotky. Stejným způsobem ale na senzor působí také gravitace. Z měření akcelerometru lze, po odstranění vlivu skutečných změn pohybu, určit směr gravitace a tím i naklonění senzoru v libovolné vertikální rovině.
Softwarové zařízení
Vlastní vyhodnocení trajektorie pohybu během manévrů probíhá softwarem vyvinutým pro účel této studie. Kombinuje získaná měření akcelerometrů a gyroskopů do transformační matice o velikosti 3 × 3 popisující postavení jednotky, resp. hlavy subjektu v prostoru.
V krátkodobém horizontu (několik sekund až desítek sekund) je přesnějším senzorem gyroskop. Okamžité změny v postavení jednotky jsou proto přejímány převážně z něj. Měření gravitace pomocí akcelerometru je použito pro dlouhodobý odhad chyb gyroskopu a jeho následnou korekci. Software zobrazuje on‑line polohu hlavy jako avatara na obrazovce počítače a rovněž ukládá data pro další zpracování. K vytvoření použitého softwaru byl použit jazyk Python a knihovna NumPy, Matplotlib a Panda3D.
Způsob provedení manévru
Před započetím každého manévru byl systém inerciální měřicí jednotky kalibrován. Proband sedí ve vzpřímeném sedu na lehátku s hlavou v neutrální poloze. Následně jsou provedeny dva statické odměry vstupních hodnot akcelerometru v poloze s napřímenou hlavou a hlavou v předklonu. Ze změřených směrů gravitace je spočtena počáteční matice, která popisuje umístění vertikály a jednotky na čele probanda. Samotný manévr vychází z pozice, kde byla zakončena kalibrace, a dále probíhá dle znázornění na obr. 1. Délka pauzy mezi jednotlivými pohybovými fázemi manévru (změnami pozice těla) byla 30 s.

Zpracování dat
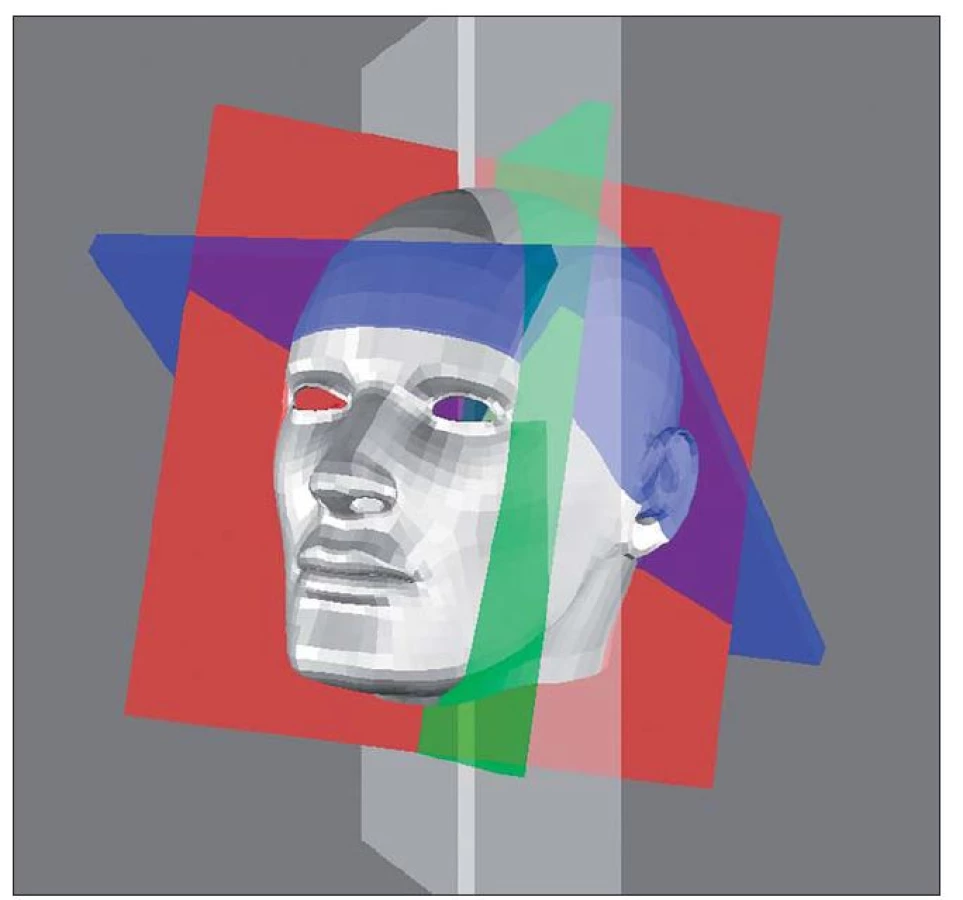
Hlavním výstupem měření jsou úhly, které svírají jednotlivé senzorické roviny s osou mířící kolmo vzhůru. Přes určitou variabilitu jejich postavení užíváme konsenzu, který uvádějí jak experimentální studie [20– 23], tak i klinické studie hodnotící repoziční manévry [4,5,7,24,25]. Pro zjednodušení pojmosloví a počítačového zpracování se standardně slučují senzorické roviny do následujících dvojic:
- rovina pravého předního a levého PSC (RALP), kde je sagitální rovina rotována 45° vpravo;
- rovina levého předního a pravého PSC (LARP), kde je sagitální rovina rotována 45° vlevo;
- rovina horizontálních kanálků (LHRH), kde je horizontální rovina rotována o 30° nahoru v její anteriorní části (obr. 2).
Při známé transformační matici je zjištění úhlů mezi uvedenými rovinami a vertikální osou dáno jednoduchým algebraickým výpočtem. Z dat naměřených při provedení SM jsou získány informace u průběhu úhlu roviny RALP v čase a roviny LARP v čase, které jsou následně využity pro analýzu. Pokud byl manévr prováděn na pravou stranu, je pro další vyhodnocování rovina LARP prohlášena za hlavní a rovina RALP za pomocnou. A opačně pokud byl manévr prováděn na levou stranu. Pro maximální léčebný účinek SM předpokládáme, že trajektorie pohybu bude probíhat v rovině postiženého kanálku. Při vyhodnocování dat tedy uvažujeme, že v ideálním případě by měl být úhel hlavní roviny v průběhu SM nulový. Hodnoty naměřené během experimentu považujeme za odchylku a použijeme je jako hodnoticí kritérium.
Změny v průběhu úhlu pomocné roviny použijeme k rozdělení manévru do fází, které jsou na jejím průběhu velmi dobře patrné. Příklad průběhů úhlů hlavní a pomocné roviny je možno pozorovat na grafu 1. Fáze byly od sebe odlišeny manuálně a byly použity dvěma způsoby. Za prvé pro vynášení normalizovaných grafů (graf 2), kde na horizontální ose není uveden čas, ale fáze; za druhé ke statistické analýze.


Statistické zpracování dat
Za závislou proměnnou byla určena odchylka od hlavní senzorické roviny (RALP nebo LARP) od nuly a to během fáze pohybu. Zkoumanými proměnnými pak byl terapeut (T1– T3), proband, strana pohybu (levá/ pravá), fáze pohybu (1, 2, 3), atributy probanda (výška, váha, věk). Statistická analýza byla provedena softwarem R, verze 3. 0. 2 testem pro model se smíšenými efekty. Jako pevný efekt byl určen terapeut, strana pohybu, fáze pohybu, interakce terapeut vs fáze pohybu, interakce strana pohybu vs fáze pohybu, výška, interakce výška vs terapeut. Náhodným efektem byl určen proband. Hodnota statistické významnosti byla stanovena na p < 0,05.
Výsledky
Vlastnosti dat
Vliv věku probanda na provedení manévru byl statisticky nevýznamný vzhledem k malému věkovému rozptylu testované skupiny. Podobně není statistický vliv probanda na určitou fázi pohybu nebo na stranu, na kterou je manévr prováděn. Variabilitu provedení manévru znázorňuje tab. 1, graf 2 a graf 3. Nejvýrazněji se projevila u terapeuta T2 (mezi – 37,17° až 31°) se standardní odchylkou 16,6 a největší rozptyl hodnot vykazuje pohybová fáze 3 se standardní odchylkou 15,8, kdy se proband vrací zpět do úvodní polohy.


Model se smíšenými efekty
Při statistické analýze dat modelem se smíšenými efekty byl prokázán statisticky významný vliv všech pevných efektů na závislou veličinu. Z tab. 2 je patrné, že tyto efekty jsou významné především ve vztahu k jinému pevnému efektu. Například na velikost výchylky od senzorické roviny má vliv to, který terapeut manévr provádí. Tento vliv sám o sobě však není signifikantně významný (p = 0,0786). Vliv terapeuta je však již statisticky významně odlišný v různých fázích pohybu. Podobný vztah je patrný u hodnocení vlivu strany pohybu na závislou veličinu. Na základě výsledků však nelze říci, že v některých fázích terapeut nebo strana pohybu vliv má a u některých ne.
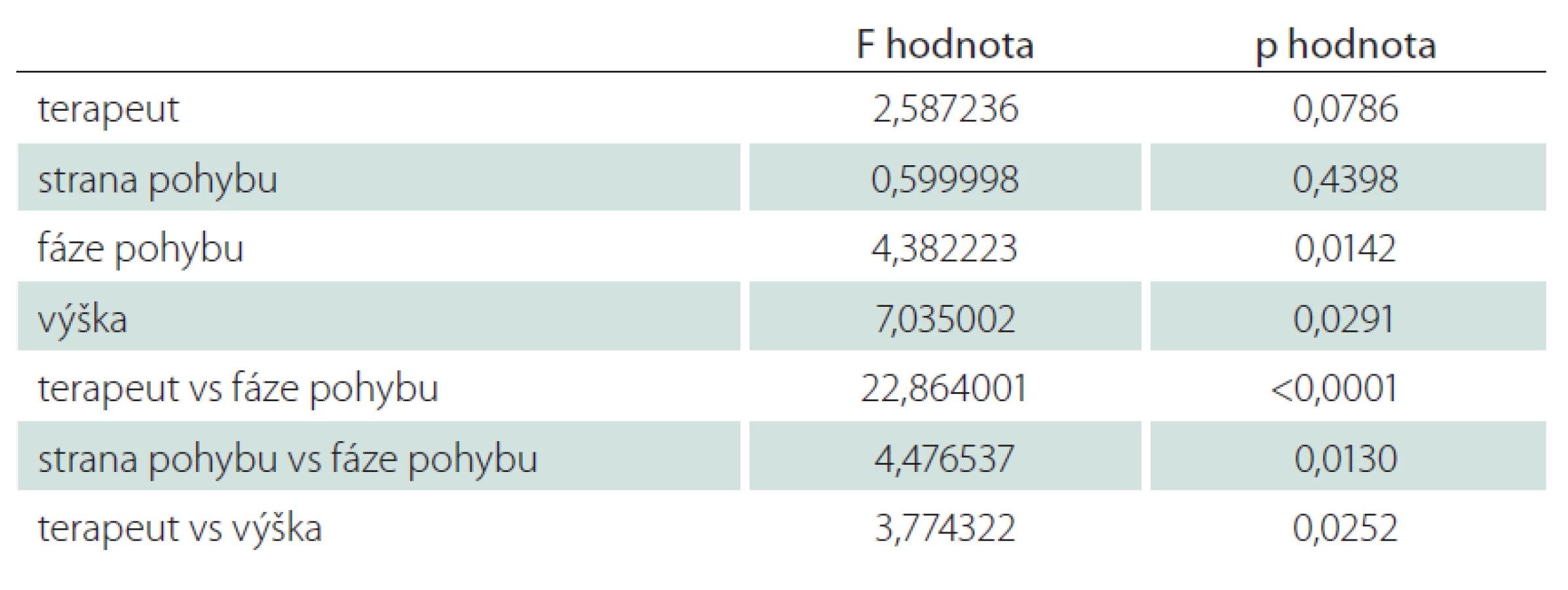
Na nezávislou veličinu i na terapeuty má také různý vliv výška probandů (p = 0,0252). Jinými slovy vliv výšky je různý u různých terapeutů. Tento výsledek spíše konstatuje vliv výšky na vychýlení od senzorické roviny, než že by popisovalo pravidelně se opakující jev. Nelze proto říci, že u některých terapeutů výška vliv má, u některých nikoliv. Vliv výšky je také jiný v různých fázích pohybu. V daném vzorku hrála největší roli ve fázi 3.
Diskuze
Naše studie si dala za cíl zjistit, jaká je variabilita opakovaného provedení terapeutického manévru, u něhož je důležité nastavení polohy hlavy do roviny PSC. Pro určení výchozích hodnotících i terapeutických parametrů jsme se opírali o závěry experimentů zabývajících se chováním otolitů v endolymfě při pohybu [19,26] a studiemi sledujícími prostorové uspořádání polokruhových kanálků [20– 23]. Pohyb otolitů ovlivňuje více faktorů, jako jsou gravitace, hustota endolymfy a rychlost a směr pohybu. Počítačový model Rajguru et al [26] vysvětlují různou latenci a velikost odpovědi na dráždění otolity v závislosti na celkové hmotnosti uvolněných otolitů a době potřebné k přesunu otolitů z ampuly na vrchol PSC. Čas setrvání v polohách je tedy variabilní. Matematické modely upozorňují na nutnost značné rychlosti změny polohy pro úspěšnou repozici otolitů [19], což potvrzují i klinické studie [5].
Při provádění SM proto terapeut musí dbát na stabilizaci hlavy v rovině postiženého kanálku a zároveň tuto aktivitu koordinovat s rychlým přesunem pacienta mezi polohami. Zvyšuje se tak technická náročnost celého manévru a s tím i související možnost vychýlení z původního nastavení. Z našich výsledků vyplývá, že tyto výchylky jsou poměrně značné a různí se intra‑ i interindividuálně, a to i přes fakt, že metodologické základy měli terapeuti zpravidla stejné. Výjimku tvořil pouze terapeut T2, který ve 3. pohybové fázi vracel hlavu pacienta do neutrálního postavení. To se ve výsledcích projevilo tím, že terapeut T2 ve 3. fázi vykazoval největší odchylky. Nicméně nejvýraznější variabilita 3. fáze i 2. terapeuta se projevila i tehdy, když byla 3. fáze u terapeuta T2 vyjmuta z hodnocení. Uvažujeme zároveň, že 3. fáze již nemá vliv na repozici otolitů. Výsledky naznačují, že terapeutickou obtížnost, a tím i pravděpodobnost vychýlení z roviny postiženého polokruhového kanálku, do jisté míry ovlivňuje vztah mezi výškou terapeuta a pacienta. Rovněž naznačují, že každý terapeut může mít problém s udržením roviny v jiné fázi manévru. Lze tedy konstatovat, že terapeuti jsou variabilní při provádění SM.
Variabilní však může být i stereotaktické nastavení polokruhových kanálků. Jako první se 3D postavením polokruhových kanálků zabývali Blanks et al v roce 1975 [20], kteří měřením kostěného labyrintu zjistili, že kromě horizontálního kanálku, jenž je od předního polokruhového kanálku nakloněn v průměru o 111°, jsou na sebe kanálky téměř kolmé. Další studie pak tyto výsledky potvrdily. Variabilita vzájemného nastavení předního a zadního polokruhového kanálku je 90,05° ± 4,74° [21], resp. 94,0° ± 4,0° [22], resp. 97,14° ± 4,82° [23]. Odchylka PSC od sagitální Reidovy stereotaktické roviny je 54,59° ± 1,59° [21], resp. 47,0° ± 5,3° [22]. Ze všech výsledků je tedy patrná jistá, i když ne výrazná, prostorová variabilita polokruhových kanálků. Velmi zřídka jsou k sobě kanálky postaveny zcela kolmo. PSC je situován téměř paralelně se zadní stěnou skalní kosti vertikálně a asi 45° vychýlenou od střední osy. Osy obou PSC se sbíhají ventrálně. Vztah PSC a střední osy těla může variovat až o 14° [23].Variabilita provedení 1. pohybové fáze je 9,4°, 2. pohybové fáze 8,4°. Je tedy možné, že variabilní stereotaktické umístění postiženého polokruhového kanálku může do jisté míry kompenzovat variabilitu terapeutického provedení.
Ověřili jsme, že strana provedení, výška probanda, fáze pohybu i samotný terapeut ovlivňují kvalitu provedení SM. Tento vliv však není konstantní. Otázkou pro další výzkum je, zda sledovaná variabilita má signifikantní vliv na klinickou úspěšnost SM nebo naopak, zda přesnost manévru nehraje až tak významnou roli, jak jsme si doposud představovali. Tato zjištění by mohla být zásadní pro optimalizaci terapie pacientů s BPPV pomocí SM.
Podpořeno TAČR – TA03011175, GAUK – 802514.
Mgr. Mariana Stehlíková
Klinika rehabilitace a tělovýchovného lékařství
2. LF UK a FN Motol
V Úvalu 84
150 06 Praha 5
e-mail: mariana.stehlikova@fnmotol.cz
Přijato k recenzi: 19. 8. 2014
Přijato do tisku: 13. 10. 2014
Autoři deklarují, že v souvislosti s předmětem studie nemají žádné komerční zájmy.
Redakční rada potvrzuje, že rukopis práce splnil ICMJE kritéria pro publikace zasílané do biomedicínských časopisů.
Zdroje
1. Fife TD. Positional dizziness. Continuum (Minneap Minn) 2012; 18(5): 1060– 1085. doi: 10.1212/ 01.CON.0000418376.80099.24.
2. von Brevern M, Radtke A, Lezius F, Feldmann M, Ziese T, Lempert T et al. Epidemiology of benign paroxysmal positional vertigo: a population based study. J Neurol Neurosurg Psychiatry 2007; 78(7): 710– 715.
3. Dagan E, Wolf M, Migirov LM. Why do geriatric patients attend otolaryngology emergency rooms? Isr Med Assoc J 2012; 14(10): 633– 636.
4. Parnes LS, Agrawal SK, Atlas J. Diagnosis and management of benign paroxysmal positional vertigo (BPPV). CMAJ 2003; 169(7): 681– 693.
5. Radtke A, von Brevern M, Tiel‑ Wilck K, Mainz‑ Perchalla A, Neuhauser H, Lempert T. Self‑ treatment of benign paroxysmal positional vertigo: Sémont maneuver vs Epley procedure. Neurology 2004; 63(1): 150– 152.
6. Cohen HS, Kimball KT. Effectiveness of treatments for benign paroxysmal positional vertigo of the posterior canal. Otol Neurotol 2005; 26(5): 1034– 1040.
7. Toupet M, Ferrary E, Bozorg GA. Effect of repositioning maneuver type and postmaneuver restrictions on vertigo and dizziness in benign positional paroxysmal vertigo. Scientific World Journal 2012; 2012: 162123. doi: 10.1100/ 2012/ 162123.
8. Brandt T, Huppert D, Hecht J, Karch C, Strupp M. Benign paroxysmal positioning vertigo: a long‑term follow‑up (6– 17 years) of 125 patients. Acta Otolaryngol 2006; 126(2): 160– 163.
9. Semont A, Freysse G, Vitte E. Curing the BPPV with a liberatory maneuver. Adv Otorhinolaryngol 1988; 42: 290– 293.
10. Cavaliere M, Mottola G, Iemma M. Benign paroxysmal positional vertigo: a study of two manoeuvres with and without betahistine. Acta Otorhinolaryngol Ital 2005; 25(2): 107– 112.
11. Moon SJ, Bae SH, Kim HD, Kim JH, Cho YB. The effect of postural restrictions in the treatment of benign paroxysmal positional vertigo. Eur Arch Otorhinolaryngol 2005; 262(5): 408– 411.
12. Massoud EA, Ireland DJ. Post‑treatment instructions in the nonsurgical management of benign paroxysmal positional vertigo. J Otolaryngol 1996; 25(2): 121– 125.
13. Papacharalampous GX, Vlastarakos PV, Kotsis GP, Davilis D, Manolopoulos L. The role of postural restrictions after BPPV treatment: real effect on successful treatment and BPPV’s recurrence rates. Int J Otolaryngol 2012; 2012: 932847. doi: 10.1155/ 2012/ 932847.
14. Li S, Tian L, Han Z, Wang J. Impact of postmaneuver sleep position on recurrence of benign paroxysmal positional vertigo. PLoS ONE 2013; 8(12): e83566. doi: 10.1371/ journal.pone.0083566.
15. Shigeno K, Ogita H, Funabiki K. Benign paroxysmal positional vertigo and head position during sleep. J Vestib Res 2012; 22(4): 197– 203. doi: 10.3233/ VES‑ 2012‑ 0457.
16. Shim DB, Kim JH, Park KC, Song MH, Park HJ. Correlation between the head‑ lying side during sleep and the affected side by benign paroxysmal positional vertigo involving the posterior or horizontal semicircular canal. Laryngoscope 2012; 122(4): 873– 876. doi: 10.1002/ lary.23180.
17. Imai T, Ito M, Takeda N, Uno A, Matsunaga T, Sekine K et al. Natural course of the remission of vertigo in patients with benign paroxysmal positional vertigo. Neurology 2005; 64(5): 920– 921.
18. Chen Y, Zhuang J, Zhang L, Li Y, Jin Z, Zhao Z et al. Short‑term efficacy of Sémont maneuver for benign paroxysmal positional vertigo: a double‑blind randomized trial. Otol Neurootol 2012; 33(7): 1127– 1130. doi: 10.1097/ MAO.0b013e31826352ca.
19. Faldon ME, Bronstein AM. Head accelerations during particle repositioning manoeuvres. Audiol Neurootol 2008; 13(6): 345– 356. doi: 10.1159/ 000136153.
20. Blanks RH, Curthoys JS, Markham CH. Planar relationships of the semicircular canals in man. Acta Otolaryngol 1975; 80(3– 4): 185– 196.
21. Hashimoto S, Naganuma H, Tokumasu K, Itoh A, Okamoto M. Three‑ dimensional reconstruction of the human semicircular canals and measurement of each membranous canal plane defined by Reid’s stereotactic coordinates. Ann Otol Rhinol Laryngol 2005; 114(12): 934– 938.
22. Della Santina CC, Potyagaylo V, Migliaccio AA, Minor LB, Carey JP. Orientation of human semicircular canals measured by three‑ dimensional multiplanar CT reconstruction. J Assoc Res Otolaryngol 2005; 6(3): 191– 206.
23. Cox PG, Jeffery N. Geometry of the semicircular canals and extraocular muscles in rodents, lagomorphs, felids and modern humans. J Anat 2008; 213(5): 583– 596. doi: 10.1111/ j.1469– 7580.2008.00983.x.
24. Levrat E, van Melle G, Monnier P, Maire R. Efficacy of the Sémont maneuver in benign paroxysmal positional vertigo. Arch Otolaryngol Head Neck Surg 2003; 129(6): 629– 633.
25. Bhattacharyya N, Baugh RF, Orvidas L, Barrs D, Bronston LJ, Cass S et al. Clinical practice guideline: benign paroxysmal positional vertigo. Otolaryngol Head Neck Surg 2008; 139 (Suppl 4): S47– S81. doi: 10.1016/ j.otohns.2008.08.022.
26. Rajguru SM, Ifediba MA, Rabbitt RD. Three‑ dimensional biomechanical model of benign paroxysmal positional vertigo. Ann Biomed Eng 2004; 32(6): 831– 846.
Štítky
Dětská neurologie Neurochirurgie NeurologieČlánek vyšel v časopise
Česká a slovenská neurologie a neurochirurgie

2015 Číslo 1
Nejčtenější v tomto čísle
- Protokol diagnostiky a léčby hyponatremie a hypernatremie v neurointenzivní péči
- Mini‑Mental State Examination – česká normativní studie
- Autoimunitní encefalitidy
- Asymptomatická spondylogenní komprese krční míchy