
Does three-dimensional preoperative planning improve accuracy of pedicle screw insertion?
Zlepšuje trojrozměrné předoperační plánování přesnost vložení pedikulárních šroubů?
Cíl: Zhodnotit superioritu předoperačního trojrozměrného (3D) plánování pomocí CT nad dvojrozměrným (2D) plánováním z hlediska přesnosti umístění pedikulárních šroubů. Materiál a metody: Ve virtuálním prostředí umístili tři chirurgové osmi pacientům ve skupině 2D pedikulární šrouby do bederní páteře po konvenčním 2D plánování. Ve skupině 3D umístili pedikulární šrouby po 3D plánování na základě CT. Po virtuálních operacích byly zaznamenány úhly trajektorie, vzdálenost míst narušení pedikulární stěny a vzdálenost odchylek od místa vstupu šroubu. Výsledky: V 2D skupině pedikulární stěnu penetrovalo 69 šroubů (28,8 %) a v 3D skupině 37 šroubů (15,5 %). Porovnání těchto dvou skupin ukázalo významnou výhodu ve prospěch předoperačního 3D plánování (p = 0,003). V 2D skupině byl průměrný úhel trajektorie šroubu vypočítaný před operací 19,65 ± 6,35° a průměrný úhel vložených šroubů měřený po operaci byl 20,79 ± 5,95°. Ve skupině 3D byl průměrný úhel trajektorie šroubu vypočítaný předoperačně 20,18 ± 5,67° a průměrný úhel vloženého šroubu změřený pooperačně byl 20,07 ± 5,85°. V porovnání s předoperačním plánováním ve skupině 3D byly šrouby vloženy v podobné orientaci (p = 0,655), ale pooperačně nebylo možné ve skupině 2D podobné orientace dosáhnout u všech úrovní (p ≤ 0,001). Závěr: Předoperační 3D plánování zlepšuje přesnost tím, že pomáhá určit bod vstupu pedikulárního šroubu a jeho směr.
Klíčová slova:
virtuální realita – trojrozměrný – plánování operace – bederní páteř – umístění pedikulárních šroubů
Authors:
H. Doğu; O. Öztürk; H. Can
Authors place of work:
Department of Neurosurgery, Medicine Hospital, Atlas Universty, Istanbul, Turkey
Published in the journal:
Cesk Slov Neurol N 2022; 85(3): 228-234
Category:
Původní práce
doi:
https://doi.org/10.48095/cccsnn2022228
Summary
Aim: To evaluate the superiority of preoperative three-dimensional (3D) CT-based planning over two-dimensional (2D) planning in terms of pedicle screw placement accuracy. Materials and methods: In a virtual environment, three surgeons placed pedicle screws in the lumbar region of eight patients in the 2D group after conventional 2D planning. In the 3D group, they placed pedicle screws after 3D CT-based planning. Trajectory angles, distance of the wall breach and distance of the screw entry point deviation were recorded after virtual surgeries. Results: In the 2D group, 69 screws (28.8%) penetrated the pedicle wall and 37 screws (15.5%) penetrated the pedicle wall in the 3D group. Comparing these two groups, preoperative 3D planning showed a signifi cant advantage (P = 0.003). In the 2D group, the mean angle of the screw trajectory preoperatively calculated was 19.65 ± 6.35°, and the mean angle of the inserted screws was postoperatively measured at 20.79 ± 5.95°. In the 3D group, the mean angle of the screw trajectory calculated preoperatively was 20.18 ± 5.67°, and the mean angle of the inserted screws postoperatively was 20.07 ± 5.85°. The screws were inserted in the similar orientation comparing to preoperative planning in the 3D group (P = 0.655), but a similar orientation could not be obtained postoperatively in the 2D group (P ≤ 0.001) for all levels. Conclusion: Preoperative 3D planning improves accuracy by helping determine the pedicle screw entry point and direction.
Keywords:
lumbar spine – virtual reality – three dimensional – surgical planning – pedicle screw placement
Introduction
Stabilisation using the pedicle screw technique is one of the most common spinal surgeries. It is a fusion surgery that is used to treat degenerative and oncological diseases, traumatic injuries and deformity. It prevents or improves neurological deficits, reduces pain and provides stability for the spine and early mobilisation for the patients [1,2].
The most important stage of this surgery is safe screw application. The anatomical variations in the vertebra make screw insertion difficult, and the presence of important neural and vascular organs in the area where the screw is applied increases the risk of surgical complications. Fluoroscopy, navigation systems, O-arm, electromyographic monitoring and three-dimensional (3D) image-guided templates have been developed to increase accuracy [3–5]. In addition to these improved methods, preoperational planning with radiological evaluation performed preoperatively can reduce incorrect application and delivery, shorten the surgical time and facilitate surgery performed with navigation [6–8].
Preoperational planning is often conducted on radiological images, such as conventional radiography, CT and MRI. In two-dimensional (2D) images, it is difficult to determine the exact pedicle insertion site and screw trajectory, especially in a vertebra with a complex anatomical structure. However, 3D anatomy of the spine structure, which is hidden from the surgeon’s direct view, needs to be mentally conceptualised and reconstructed. Recently, preoperational planning is possible on computer-based 3D reconstruction obtained from patient-specific CT images [7,9,10]. Although navigation systems have this functionality, some software is commercially available for this purpose.
This study performed virtual operations on the simulation and aimed to evaluate whether preoperative planning on CT-based 3D reconstruction increased the accuracy by comparing the preoperative planning on CT images and postoperative measurements.
Materials and methods
Eight patients, including four men and four women, aged between 42 and 75 years were randomly selected to process their lumbar vertebral CT scans from the radiological database of our hospital. During selection, CT scans of patients with an osteoporotic spine or advanced deformity were excluded. Spinal CT scans with 1- mm slice thickness were transferred to the free software 3D Slicer, version 4.10.2 (Surgical Planning Laboratory, Harvard University, Boston, MA, USA), and stereolithography-extended 3D file formats were maintained for each patient. Each file was applied to another free software Meshmixer (version 3.5.474 (Autodesk, Inc., San Rafael, USA), and operative fields were virtually generated in silico. All possible visuals that could clue in screw trajectory were shadowed to provide realistic operating conditions (Fig. 1).
Obr. 1. Virtuální operace může být provedena
zastíněním anatomických struktur,
které nejsou při operaci vidět.

Three neurosurgeons without experience on pedicle simulation performed the procedures. In the 2D group, the surgeons planned the surgery by evaluating conventional radiological scans, such as radiography, CT and MRI (Fig. 2). They determined the entry points and noted the angles of the screw trajectories that they intended to insert. Following the planning, the surgeons inserted 240 pedicle screws to eight patients virtually. Using the posterior view of the 3D spine model generated in the simulator, the surgeon preoperatively identified the entry point that was determined on the surface of a vertebral pedicle for each screw. The surgeon began positioning the tip of each screw at the entry point and proceeded by rotating each screw to an intended trajectory. During the procedure, when requested by the surgeon, lateral and anterior posterior lumbar fluoroscopic images were provided to be observed on the 3D simulator as in the realistic operating conditions (Fig. 3a, b). After the insertion, the surgeons were blinded to the results. In the 3D group, the surgeons examined the 3D views to plan the surgeries to determine the specifics for each patient (Fig. 4). After planning, pedicle screw insertions were executed in the same 3D simulator considering the information obtained via 3D planning under the same operating conditions.
Obr. 2. Předoperační plánování pomocí
2D snímků.

Obr. 3. Vytváření fluoroskopii podobných anteroposteriorních (a) a laterálních (b) snímků
s 3D rekonstrukcí.

Obr. 4. Předoperační 3D plánování a nácvik; výběr vhodného umístění šroubů tak, aby
byly chráněny fazetové klouby, šrouby, tyče a spoje, které mohou být aplikovány.

After virtual surgeries were completed, shadings on the resultant images in the simulator were uncovered and rendered for assessment of the screw positions. Similar to spinal CT, images were evaluated in the axial slices to calculate the angle of the screw trajectory and exhibit the wall breach of the screw (Fig. 5). Trajectory angles, existence of the wall breach and distance of the wall breach (mm) were recorded. Moreover, the existence of deviation of the screw entry point and distance of the deviation (mm) were recorded by another surgeon who was blinded to the aim of the study.
Obr. 5. Kontrola pooperační penetrace,
měření úhlů šroubů a měření bodů pro
vstup.

Statistical analysis
Data distribution was assessed using skewness and kurtosis tests. Categorical variables were analysed using the Chi-squared test. Interactions between the variables were examined using a logistic regression test. Paired sample t-test, Mann-Whitney’s U test and Kruskal-Wallis test were performed to compare the means. All statistical analyses were performed using SPSS version 20.0 (IBM, Armonk, NY, USA). A P-value < 0.05 indicated statistical significance.
Results
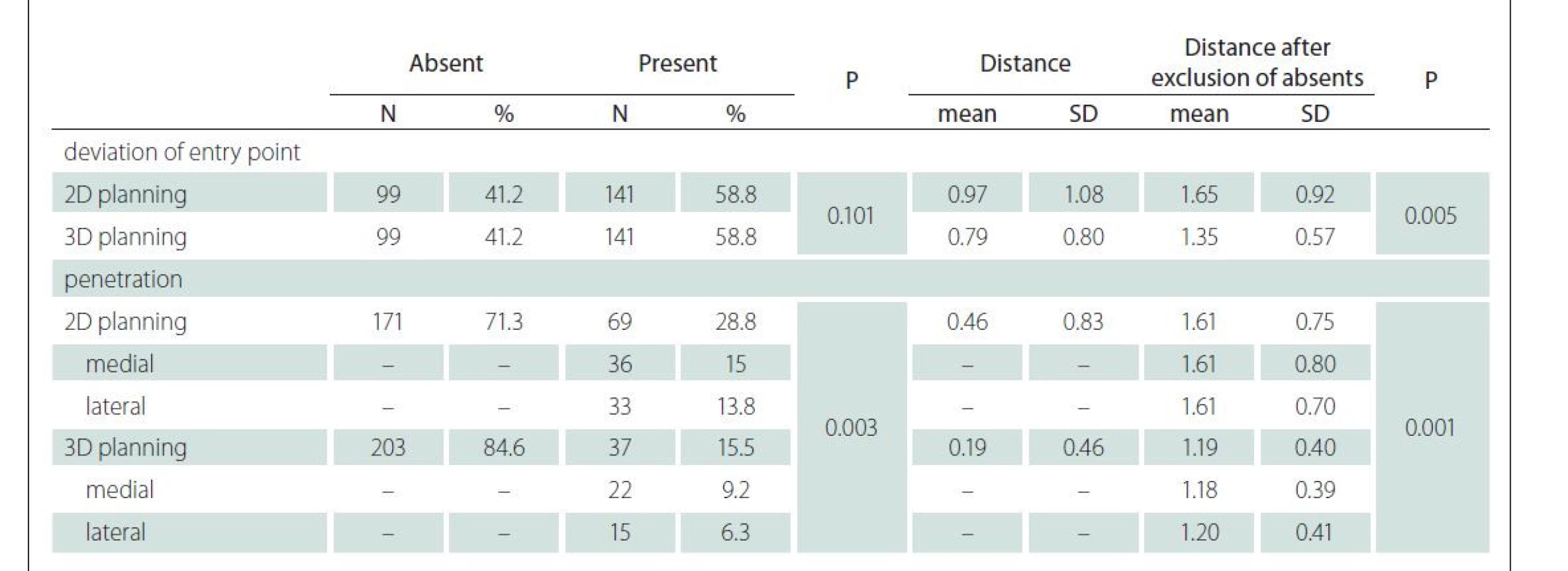
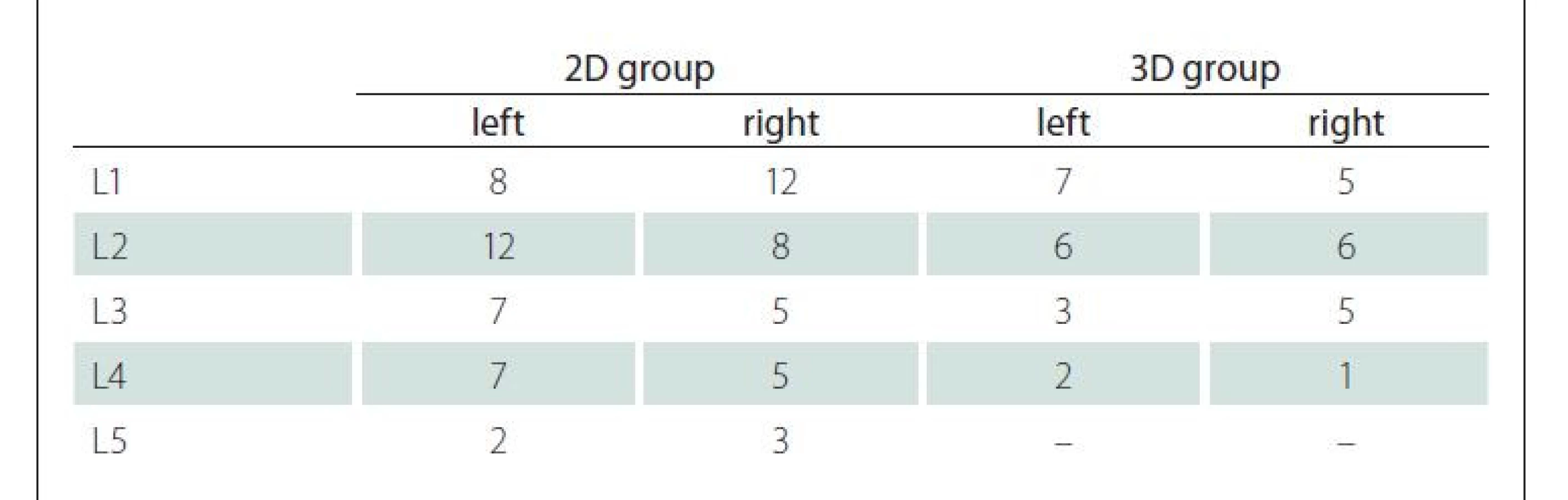
A total of 240 pedicle screws were placed in the simulator after planning on the conventional radiological images and 240 pedicle screws after planning on the 3D images. In the 2D group, 69 screws (28.8%), 33 (13.8%) to the lateral wall and 36 (15%) to the medial wall penetrated the pedicle wall. In the 3D group, 37 screws (15.5%), 15 (6.3%) to the lateral wall and 22 (9.2%) to the medial wall penetrated the pedicle wall. In the comparison of the two groups, preoperative 3D planning showed significant advantage (P = 0.003). The mean distance of penetration was signifi cantly less in the second group (P = 0.001, 0.46 ± 0.83 mm and 0.19 ± 0.46 mm). After excluding the screws that did not breach the wall, the mean distance of penetration demonstrated the same feature in favour of the 3D group (1.61 ± 0.75 mm and 1.19 ± 0.40 mm; P = 0.001) (Tab. 1). To assess the factors that could be affected by individual variables, logistic regression test was performed separately for both groups. It revealed that the surgeon, patient and side did not influence penetration through the pedicle wall. Conversely, as the spine level to which the screw inserted became higher, the penetration rate increased in both groups (P ≤ 0.001 for both groups), mainly due to narrower pedicle thickness. Likewise, the mean distance of penetration increased as the spine level became higher within each group (P ≤ 0.001 for both groups) (Tab. 2). The number of deviations of the entry point seemed to be the same for both groups, and the mean distances of the deviations were not statistically different between the groups (N = 141/ 240 and N = 141/ 240; P = 0.101 for 2D and 3D groups; 0.97 ± 1.08 mm and 0.79 ± 0.80 mm; P = 0.245 for 2D and 3D groups). Excluding the screws that did not deviate from the determined entry point, the mean distances of deviations were statistically signifi cant in favour of 3D planning (1.65 ± 0.92 mm and 1.35 ± 0.57 mm; P = 0.005) (Tab. 1).
In the 2D group, the mean angle of screw trajectory calculated preoperatively was 19.65 ± 6.35°, and the mean angle of the inserted screws postoperatively was 20.79 ± 5.95° (Tab. 3). In the 3D group, the mean angle of screw trajectory calculated preoperatively was 20.18 ± 5.67°, and the mean angle of the inserted screws postoperatively was 20.07 ± 5.85° (Tab. 4). Statistical analyses revealed that the screws were inserted in the similar orientation planned preoperatively when 3D planning was executed (P = 0.655), but a similar orientation could not be obtained postoperatively when 2D planning was executed (P ≤ 0.001) for all levels. When each level was separately evaluated, no level presented any difference between preoperative planning and postoperative measures for 3D planning (P = 0.948 for L1; P = 0.946 for L2; P = 0.625 for L3; P = 0.317 for L4 and P = 0.099 for L5). The bottom two levels also did not show any statistical difference for 2D planning (P = 0.743 for L4 and P = 0.982 for L5). Conversely, preoperatively planned and postoperatively measured trajectory angles were 15.33 ± 2.78° and 17.04 ± 2.94° in the L1 vertebrae (P = 0.003), 15.38 ± 2.11° and 17.13 ± 3.27° in the L2 vertebrae (P = 0.002), and 18.27 ± 4.01° and 20.29 ± 5.34° in the L3 vertebrae (P = 0.003), respectively, for 2D planning (Tab. 3, 4).


Discussion
Pedicle screw fixation of the lumbar spine has been performed for decades in neurosurgical and orthopaedic interventions. The surgical technique described by Camille, which defines the pedicle entry point, angle and screw thickness and length, continues to be relevant and applied in a similar way [11–13]. As technological advances occur, contemporary tools and systems have been developed to assist in the surgery.
In the phase of planning for the surgery, the spine of individuals is conventionally evaluated with 2D radiological workups. It provides an indirect assessment to conceptualise the 3D anatomy and might be deceptive to estimate the accurate placement of the pedicle screws. The determination of the entry point and trajectory closest to reality should be procured preoperatively to facilitate the surgery and increase the accuracy since only the posterior surface of the spine could be viewed during surgery and the inserted screws extend to the part of the structure that is invisible to the surgeon. To achieve this goal, 3D visualisation could be considered to comprehend the surgical environment of the spine during the preparation for the surgery.
Various types of software are available for preoperative planning in the 3D environment, and there are previous studies that intended to exhibit the contribution of evaluation with this software preoperatively. To provide previous examples, Xiang et al [7] focused on training with patient-specific images in their study on 3D simulation with two junior and two experienced surgeons. They found that pre-insertion training shortened the operative time and decreased the penetration. Rambani et al [14] worked with 12 surgeons and focused on training and performed the evaluation by scoring those who trained and those who did not. The scores of those who trained were better. In another study, Hou et al [15] trained a group of inexperienced surgeons for screw placement with simulation and pedicle screws inserted into cadavers. The penetration rate was lower in the trained group compared to others. In this study, we conducted preoperative planning on 3D reconstruction with software. We evaluated the results of both 2D and 3D planning and investigated whether 3D planning affected the outcome. Including multiple surgeons and working on the same patients in the simulation allowed us to standardise the study. We could analyse whether there was an anomaly in the detection of the screw insertion point or angling. Consistent results that were not affected by the factors caused by the surgeons or patient- specific anatomical variation were obtained, as demonstrated by the logistic regression test. Thus, we could conveniently compare the contributions of two preoperative planning methods that we analysed.
Anatomic landmarks were used in 2D planning to determine the entry point. In addition to using anatomical signs in 3D planning, it was possible to virtually identify the entry points on the surface image preoperatively. Pedicle screw angles were studied in both planning methods. Assessing our results, we observed that 3D planning provided a better survey to the surgeon to understand the surgical site. Preoperative and postoperative results in the 2D group were different for the entry point and/ or axial angle that was planned and applied by the surgeon. Moreover, breaching the pedicle wall was observed more in surgeries after 2D planning.
When we evaluate the measurements for each level, penetration was more commonly noted in the upper lumbar vertebrae in our study. Parker et al [16] also reported that pedicles of L1 and L2 vertebrae were breached in screw insertion with a higher rate compared to other lumbar levels. Zhao et al [17] reported that most poor pedicle screw misplacements were caused by a narrow vertebra pedicle. The pedicles of the upper lumbar vertebrae were more vulnerable to breach during pedicle screwing because of the narrower size and more perpendicular angle with a closer margin. Thus, a better way of preoperative planning is important for the upper levels of the lumbar vertebrae.
As in a similar way of assessing the entry point, Archavlis et al [18] studied upper facet joint violation during percutaneous pedicle screwing. They showed a lower rate of violation after 3D planning. Penner et al [19] examined preoperative 3D planning for transcortical screwing. They focused on determining the entrance location visually in the simulation and identifying the exact point during surgery. One of the benefits of preoperative 3D planning is positioning on the 3D surface. In the 2D evaluation, CT sections that do not cross parallel to the endplate could become a limitation and make it difficult to determine the entry location. In our study, the number of deviations in entry points were similar in both groups, but the difference in the mean distances between precalculated and applied entry points showed us that better results were maintained for identifying the entry points.
Determining the entry point shows an importance in the lower lumbar vertebra. Although the variations of posterior elements rarely occurred in the upper levels, the entry point differs particularly in the L5 vertebra. Castellvi et al [20] defined different types of transverse processes in partial sacralisation of the L5 vertebra. Initially, they defined a transverse pedicle wider than 19 mm as type 1 variation, and more significant variations were specified in other three types. In another study, excluding the Castellvi type 3 and 4 transitional variations, Su et al [21] recognised two different morphologies of L5 vertebra pedicles according to the relationship between the transverse process and pedicle. They calculated that the entry point of the type 2 pedicle was localised more laterally than expected. These variations that could affect the entry point and screw trajectory angle should be well identified preoperatively. A 3D study might be better to adapt in individuals with variative anatomy. Hereinbefore, surgeons were able to achieve the previously calculated angle during surgery in a more precise way considering all preoperative angle measurements and postoperative screw angles.
Preoperative planning is required for both freehand and navigational systems [22,23]). Programmes such as Brainlab (Brainlab, Westchester, IL, USA), Surgimap (Surgimap Spine Software, Nemaris Inc., New York, USA), and 3D Slicer pedicle simulators are paid and do not provide pedicle screw simulation, but they are not practical and sensitive [7,9,10,14,15,18,24–27]. Navigational systems have 3D planning, but these are expensive and decentralised systems.
Wi et al [27] developed a simulation software, in which the entry point, screw direction, convergence angle and screw length could be determined. Another engineering study reported a simulation showing the loading of a patient-specific CT and creating a 3D model, producing fluoroscopy images, simulating the surgical procedure and preoperative planning, and by comparing it with a specialist’s plan, the surgeon’s preoperative plan has been professionally evaluated. Functions were combined in a single software, and feedback was provided on the joystick; however, it was not an open source [6]. Xu et al [28] conducted preoperative planning with 3D printing in patients with vertebral trauma. Augustine et al [9] also conducted preoperative planning of patients with scoliosis in the 3D environment. Additionally, they performed not only 3D printing of vertebrae for planning but also trial operations on it. 3D printing is a promising technology that has been widely used recently. However, it is a laborious and time-consuming technical process.
In our study, unlike in many studies, we showed that a complete application could be made with rods and interconnections in a short time using an easily reachable freeware programme. Additionally, we have shown that rods and interconnections can be applied in the software. We have ensured that the screw heads, rods and interconnections can be positioned according to the facet and other posterior elements.
The impacts of different preoperative planning methods were assessed by virtual simulation of the operations in this study, but we encountered other studies that showed low breach rates. In one study, pedicle wall penetration was reported with a rate of < 1% and 4% at different levels [16]. Hicks et al [29] reported pedicle screw malposition up to a rate of 15% in different studies, but also mentioned that many studies agreed that an encroachment in the spinal canal up to 2 mm was acceptable; many authors reported their malposition rates based on radiographic evaluation. However, it must be stated that a meta-analysis presented a wide range of malposition rates with a median accuracy of 86.6% (27–100%) in surgeries without using navigational systems [30]. We accepted any existence of breaches as a malposition and screw position was evaluated in a virtual 3D environment. Differences among the evaluation methods of malposition should inevitably affect the rates. Moreover, in real surgery, guidance of the cortical bone of pedicles during tunnelling could also be a factor in increasing the accuracy. In our study, no feedback was provided to increase the simulation feeling, and it may be disadvantageous to do so.
Conclusion
Freehand lumbar pedicle screwing has been generally accepted by many authors as a safe method to maintain posterior stabilisation. However, the technique remains open for complications, such as screw misplacement and neural damage. Hereby, many studies have been conducted to investigate the proper assistance to increase accuracy. However, no consensus has been built in a particular way although a few were mentioned. We believe that the most decisive factor is fully understanding the surgical site by the surgical team and assistance to strengthen the conception of each individual anatomy would have an effect on the inference of the surgery. Our study presented that preoperative planning on the 3D virtual environment was better to conceptualise the anatomy more accurately for the surgeon rather than conventional planning and better results have been obtained with 3D planning. Most importantly, it was observed that the pedicle breach rate decreased in half under circumstances of the same virtual environment. The disadvantage of simulating the operation virtually is that the surgeon is deprived of feeling bone resistance and the question of how much this will affect the results. In view of such information achieved from our results, further studies should be conducted for better understanding the impact of the suggested unconventional planning process on real surgery.
Ethical principles
The entire study was conducted in accordance with the Helsinki Declaration of 1975 (as revised in 2004 and 2008). The study protocol was approved by Istanbul Atlas University, Non-Interventional Scientific Research Ethics Committee (date of approval: 20. 12. 2020; number of approval: E-22686390-050.01.04-4759). All subjects provided written informed consent prior to their participation in the study.
Conflict of interest
The authors declare they have no potential conflicts of interest concerning drugs, products, or services used in the study.
The Editorial Board declares that the manuscript met the ICMJE “uniform requirements” for biomedical papers.
Redakční rada potvrzuje, že rukopis práce splnil ICMJE kritéria pro publikace zasílané do biomedicínských časopisů.
Accepted for review: 5. 9. 2021
Accepted for print: 8. 3. 2022
Hüseyin Doğu
Department of Neurosurgery
Medicine Hospital
Atlas Univercity
Hoca Ahmet Yesevi Cad. No 149,
Bağcılar, Istanbul,
Turkey
e-mail: huseyindogu@gmail.com
Zdroje
1. Park SM, Shen F, Kim HJ et al. How many screws are necessary to be considered an experienced surgeon for freehand placement of thoracolumbar pedicle screws?: analysis using the cumulative summation test for learning curve. World Neurosurg 2018; 118: e550–e556. doi: 10.1016/ j.wneu.2018.06.236.
2. Reid PC, Morr S, Kaiser MG. State of the union: a review of lumbar fusion indications and techniques for degenerative spine disease. J Neurosurg Spine 2019; 31(1): 1–14. doi: 10.3171/ 2019.4.SPINE18915.
3. Du JP, Fan Y, Wu QN et al. Accuracy of pedicle screw insertion among 3 image-guided navigation systems: systematic review and meta-analysis. World Neurosurg 2018; 109: 24–30. doi: 10.1016/ j.wneu.2017.07.154.
4. Mikula AL, Williams SK, Anderson PA. The use of intraoperative triggered electromyography to detect misplaced pedicle screws: a systematic review and metaanalysis. J Neurosurg Spine 2016; 24(4): 624–638. doi: 10.3171/ 2015.6.SPINE141323.
5. Yu C, Ou Y, Xie C et al. Pedicle screw placement in spinal neurosurgery using a 3D-printed drill guide template: a systematic review and meta-analysis. J Orthop Surg Res 2020; 15(1): 1. doi: 10.1186/ s13018-019-1510-5.
6. Song G, Bai H, Zhao Y et al. Preoperative planning and simulation for pedicle screw insertion using computed tomography-based patient specific volume rendering combined with projection fluoroscopy. Int Rob Auto J 2017; 2(1): 25–29. doi: 10.15406/ iratj.2017.02.00011.
7. Xiang L, Zhou Y, Wang H et al. Signifi cance of preoperative planning simulator for junior surgeons’ training of pedicle screw insertion. J Spinal Disord Tech 2015; 28(1): E25–29. doi: 10.1097/ BSD.0000000000000138.
8. Muralidharan V, Swaminathan G, Devadhas D et al. Patient-specifi c interactive software module for virtual preoperative planning and visualization of pedicle screw entry point and trajectories in spine surgery. Neurol India 2018; 66(6): 1766–1770. doi: 10.4103/ 0028-3886.246 281.
9. Augustine KE, Stans AA, Morris JM et al. 2010. Plan to procedure: combining 3D templating with rapid prototyping to enhance pedicle screw placement. [online]. Available from: https:/ / ui.adsabs.harvard.edu/ abs/ 2010SPIE.7625E..0SA/ abstract.
10. Eftekhar B, Ghodsi M, Ketabchi E et al. Surgical simulation software for insertion of pedicle screws. Neurosurgery 2002; 50(1): 222–223; discussion 223–224. doi: 10.1097/ 00006123-200201000-00038.
11. Esses SI, Sachs BL, Dreyzin V. Complications associated with the technique of pedicle screw fi xation. A selected survey of ABS members. Spine (Phila Pa 1976) 1993; 18(15): 2231–2238; discussion 2238–2239. doi: 10.1097/ 00007632-199311000-00015.
12. Perna F, Borghi R, Pilla F et al. Pedicle screw insertion techniques: an update and review of the literature. Musculoskelet Surg 2016; 100(3): 165–169. doi: 10.1007/ s12306-016-0438-8.
13. Roy-Camille R, Saillant G, Mazel C. Internal fixation of the lumbar spine with pedicle screw plating. Clin Orthop Relat Res 1986; 203(203): 7–17. doi: 10.1097/ 00003086-198602000-00003.
14. Rambani R, Ward J, Viant W. Desktop-based computer- assisted orthopedic training system for spinal surgery. J Surg Educ 2014; 71(6): 805–809. doi: 10.1016/ j. jsurg.2014.04.012.
15. Hou Y, Lin Y, Shi J et al. Eff ectiveness of the thoracic pedicle screw placement using the virtual surgical training system: a cadaver study. Oper Neurosurg (Hagerstown) 2018; 15(6): 677–685. doi: 10.1093/ ons/ opy 030.
16. Parker SL, McGirt MJ, Farber SH et al. Accuracy of freehand pedicle screw in the thoracic and lumbar spine: analysis of 6816 consecutive screws. Neurosurgery 2011; 68(1): 170–178. doi: 10.1227/ NEU.0b013e3181fdfaf4.
17. Zhao Q, Zhang H, Hao D et al. Complications of percutaneous pedicle screw fixation in treating thoracolumbar and lumbar fracture. Med 2018; 97(29): e11560. doi: 10.1097/ md.0000000000011560.
18. Archavlis E, Ringel F, Kantelhardt S. Maintenance of integrity of upper facet joints during simulated percutaneous pedicle screw insertion using 2D versus 3D planning. J Neurol Surg A Cent Eur Neurosurg 2019; 80(4): 269–276. doi: 10.1055/ s-0039-1681042.
19. Penner F, Marengo N, Ajello M et al. Preoperative 3D CT planning for cortical bone trajectory screws: a retrospective radiological cohort study. World Neurosurg 2019; 126: e1468–e1474. doi: 10.1016/ j.wneu.2019.03. 121.
20. Castellvi AE, Goldstein LA, Chan DP. Lumbosacral transitional vertebrae and their relationship with lumbar extradural defect. Spine (Phila Pa 1976) 1984; 9(5): 493– 495. doi: 10.1097/ 00007632-198407000-00014.
21. Su BW, Kim PD, Cha TD et al. An anatomical study of the mid-lateral pars relative to the pedicle footprint in the lower lumbar spine. Spine (Phila Pa 1976) 2009; 34(13): 1355–1362. doi: 10.1097/ BRS.0b013e3181a4f3a9.
22. Sabri SA, York PJ. Preoperative planning for intraoperative navigation guidance. Ann Transl Med 2021; 9(1): 87. doi: 10.21037/ atm-20-1369.
23. Su P, Zhang W, Peng Y et al. Use of computed tomographic reconstruction to establish the ideal entry point for pedicle screws in idiopathic scoliosis. Eur Spine J 2012; 21(1): 23–30. doi: 10.1007/ s00586-011-1962-8.
24. Fujibayashi S, Takemoto M, Neo M et al. Strategy for salvage pedicle screw placement: a technical note. Int J Spine Surg 2013; 7: e67–71. doi: 10.1016/ j.ijsp.2013.03. 002.
25. Hu W, Zhang X, Yu J et al. Vertebral column decancellation in Pott’s deformity: use of surgimap spine for preoperative surgical planning, retrospective review of 18 patients. BMC Musculoskelet Disord 2018; 19(1): 13. doi: 10.1186/ s12891-018-1929-6.
26. Klein S, Whyne CM, Rush R et al. CT-based patientspecific simulation software for pedicle screw insertion. J Spinal Disord Tech 2009; 22(7): 502–506. doi: 10.1097/ BSD.0b013e31819877fd.
27. Wi W, Park SM, Shin BS. Computed tomographybased preoperative simulation system for pedicle screw fi xation in spinal surgery. J Korean Med Sci 2020; 35(18): e125. doi: 10.3346/ jkms.2020.35.e125.
28. Xu W, Zhang X, Ke T et al. 3D printing-assisted preoperative plan of pedicle screw placement for middle- upper thoracic trauma: a cohort study. BMC Musculoskelet Disord 2017; 18(1): 348. doi: 10.1186/ s12891- 017-1703-1.
29. Hicks JM, Singla A, Shen FH et al. Complications of pedicle screw fixation in scoliosis surgery. Spine (Phila Pa 1976) 2010; 35(11): E465–470. doi: 10.1097/ BRS.0b013e3181d1021a.
30. Kosmopoulos V, Schizas C. Pedicle screw placement accuracy: a meta-analysis. Spine (Phila Pa 1976) 2007; 32(3): E111–120. doi: 10.1097/ 01.brs.0000254048.79024.8b.
Štítky
Dětská neurologie Neurochirurgie NeurologieČlánek vyšel v časopise
Česká a slovenská neurologie a neurochirurgie

2022 Číslo 3
Nejčtenější v tomto čísle
- Neurological symptoms associated with COVID-19 based on a nation-wide online survey
- Effects of electrical stimulation according to Jantsch on spasticity – a pilot study
- Stanovisko Sekce pro diagnostiku a léčbu bolestí hlavy
- Intracerebral haemorrhage in COVID-19